Hi,
We have a hexacopter with 10 kg payload. There is a small radar and signal generator on the drone. We have tuned the drone. It has nice flight performance. The log of good flight performance is as follows:
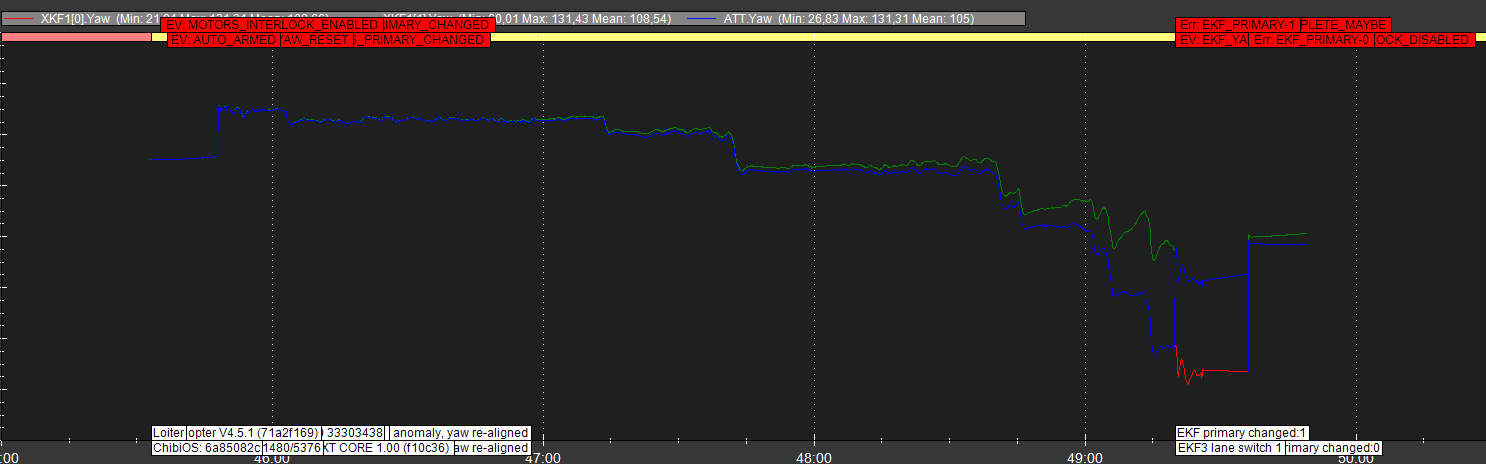
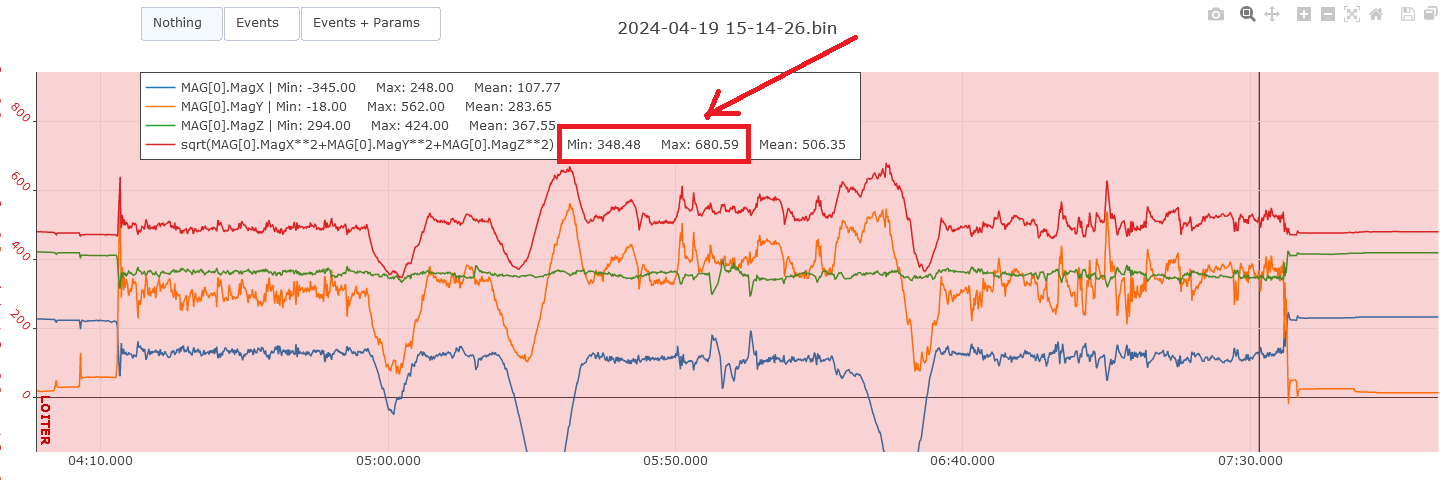
But we had a very risky flight with Error EKF Primary-1 in the log. Drone flies well at first 3-4 minutes. Then I have seen compass invariance error I think I am not sure but it was something related to compass. Then drone made very strange behaviour on roll/pitch directions, not too much yaw but. I looked at at the log a little bit. It seems there is also roll/pitch commands but I dont think it is my rc commands. In the log there is Error EKF Primary-1 error just before the problem. I tried to land and descend hopefully drone recovered attitude but it was a hard landing. Drone has 1 CUAV C-RTK and 1 Here3 GPS. Primary yaw is coming from Here3 GPS. Below is the log file.
I am not sure whether this problem is related to compass data, the effect of our payload on RC or compass, or something related to autopilot. We use the drone for research and development purposes but I am not confident with the overall system after these problems. I would be glad if you can review the log and share your toughts.