The phenomenon of taking off again as soon as it touches the ground upon automatic landing
How can I solve this problem?
The phenomenon of taking off again as soon as it touches the ground upon automatic landing
How can I solve this problem?
AUTO_OPTIONS, 3
DISARM_DELAY, 0 (or greater than the time before take off again)
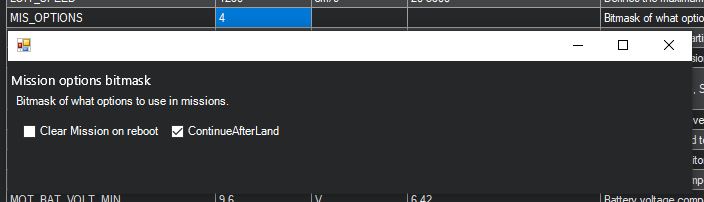
MIS_OPTIONS,4
MIS_OPTIONS, There is Only description 0 or 2 options in the ardupilot docu and Mission planner parameter.
Should I ignore it and change it to 4?
The common error of not understanding it’s a bitmask. Many parameters are. This one states that it is.
Thanks, I should test again in this week.