If the craft lands on a slope, then is placed on level ground prior to the next launch, it will tilt to the angle of the slope that it had landed on previously.
Here is a test where we did the following:
Launch and land from level ground.
Launch from level ground and land on slope
Place the craft back on level ground and launch again.
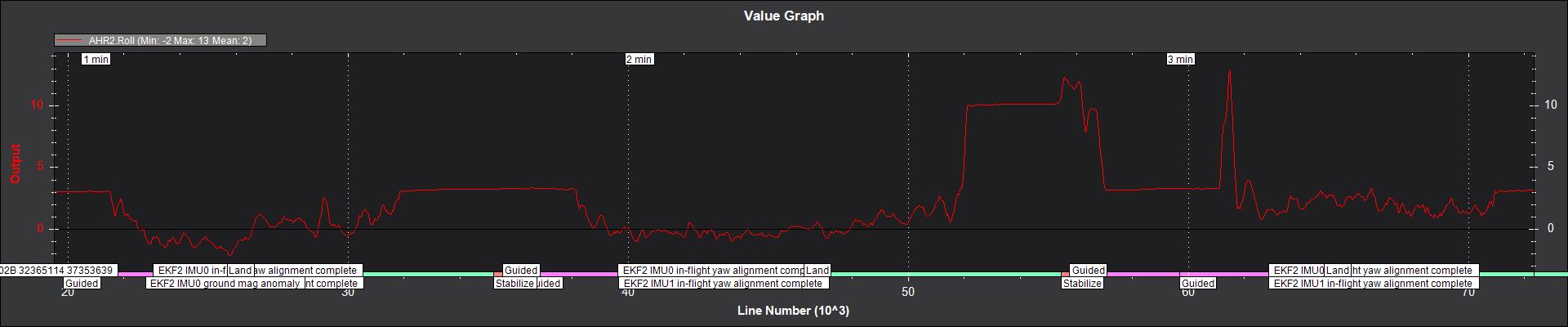
Here is a graph of the roll axis of the craft. For the first flight it lands at pretty much the same angle it took off from (level launch, level land). On the second flight the roll angle at landing was tilted over (roughly 10 degrees) because it landed on a slope. Then the craft was placed back on level ground (you can see this on the roll axis).
When it took off again, it immediately tries to achieve the roll angle that it had during the previous landing. Then pretty quickly corrects itself.
I only graphed roll - but desired roll was pretty much the same.
No, it doesn’t remember any landing angle. The controller will keep it level as long as your stick is centered. I see you are flying in stabilize so it could be you. Try take off in loiter and low wind and see how it goes. When you arm to take off do it quickly. If you are running the motors up gradually and sitting on a slope the controller cam build an large integral because it’s trying to be level and it can’t because its not flying yet.
The craft is not being flown in stabilize. It is being flown in guided. When the craft lands, it is switched into stabilize to get it out of land mode prior to being put back into stabilize. So it isn’t the stick - there is no stick involved in this.
Something is definitely being remembered from the landing to takeoff. It looks like possibly an integral value on a PID or perhaps a setpoint. I can cause it to happen regularly.
Here are the important points:
I always take off from level ground.
If the previous landing was on level ground, the takeoff is fine.
If the previous landing was on a slope, the craft is then moved to level ground prior to launch. However, when it launches, it immediately goes to the angle of the slope that it landed on previously - then comes back to level.
Keep in mind that it is not launching from the slope - it was moved from the slope to the level ground after it landed - but it still tries to go to the last angle it had during the previous landing.