Hi there,
I am using a PH2.1 with PX4Flow and a LIDAR TeraRanger One. Everthing is working fine, but sometimes the PX4Flow Sensor doesn´t booted correctly (caused by simultaneously suppling with power). So then I disconnect the PH from Power and reconnect it. After booting the PX4Flow Sensor should be reconized by the PH. A procedure I did several times. But this time I started flying and I reconized the Flow Sensor is not working. So I landed disarmed the copter with the Transmitter. Then I unplugged the Power-Cable from Power Module to the Pixhawk. Suddenly the Engine Speeded up which can be dangerous.
I don´t know why. Maybe I should have disarmed the copter with the safetyswitch as well!?
I am using a Taranis X9D Plus with X8R via SBus.
So now I am looking for the reason and for a better solution for rebooting the Pixhawk.
Hi there,
so I downloaded the last Log file and tried to study, couldn’t find anything that helps me. But I am a beginner in checking logfiles. Maybe you can find something helpfully.
The file is to big to upload here so I put it onto gigamove:
Edit:
I just tried to precipitate the failure. But on the Desktop the engines don’t Speed up when I unplugg the powercable from the Pixhawk. It doesn’t matter how I disarmed the copter.
Maybe it could be an issue by the ESC? That they unload the capacitors after a longer flying time.
Hi Fi156,
that Looks great! Thank you, is there an other tool for viewing log filed besides MP?
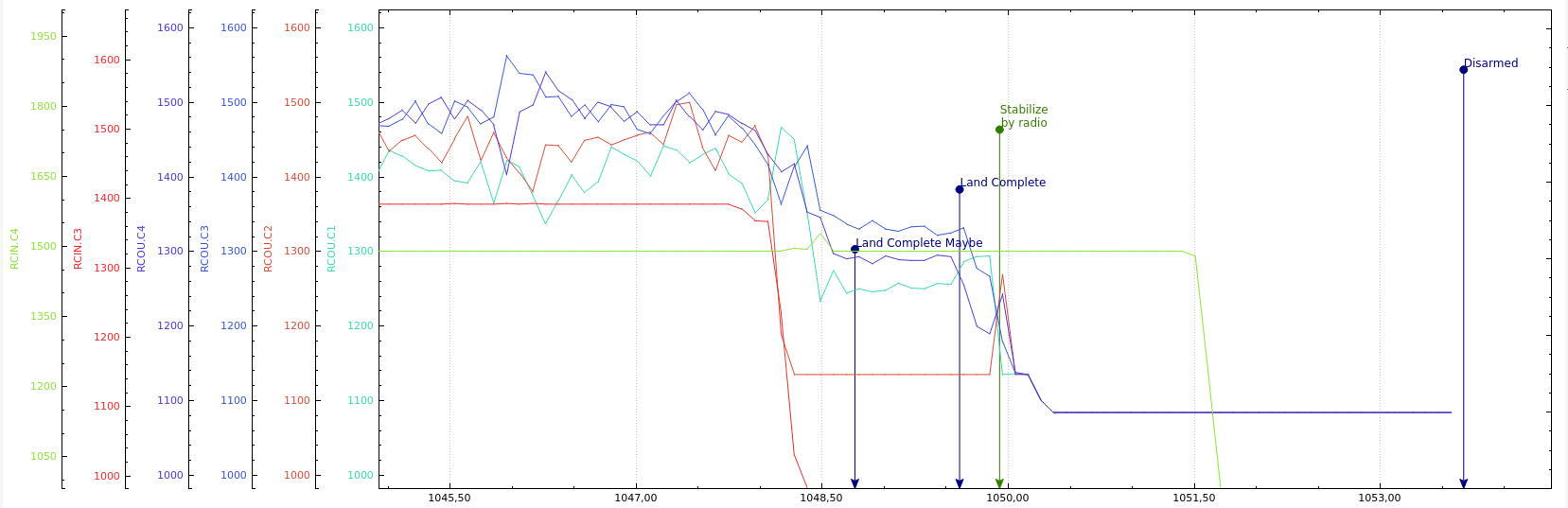
Yes that’s correct. When I Switch back from AltHold or Loiter to Stabilized the Gas Channel is to high so the Motor Speed up a bit until I reduce the Gas Value back to a Floating Level.
I think so. I disconnected the PH from Power by unplugging it from the Power-Modul. The ESC has been still connected via the PDB with the Batterie. I wanted to reboot the PH because of an Bad OptFlow Health issue. I have to make sure that the LIDAR and PX4Flow powered before the PH to avoid this failure.
So when I unplugged the PH from the Power-Modul the Motors started running with full power I guess. Just for a half of second like this. I did this several times this way without any problems.
So I am thinking about how to reboot the PH via remote controll without additional Hardware. That could be something for the new Version of ArduCopter