I can’t autotune this build yet because it’s not quite flyable enough. It ascends fine, and seems ok on pitch/roll/yaw, but it wants to fall out of the sky on descent (loses attitude stabilization). I could just barely coax it downwards by feathering it with the slowest descent I could. Got lucky, truth be told. It was right on the line.
@xfacta I used your spreadsheet for starting parameters (thanks again for that valuable resource) but maybe my build has mis-matched components?
Quad masses 1300g 470kV motors, pretty large frame. I put 16.4x5.9 props on it. Initially I tried it with 4S but for some reason it wouldn’t go above an idle?? What’s that about? Then I threw a 6S on there and that’s when I had the exciting experience of only being able to fly stably when ascending or hovering. Whenever I tried to descent it would stall and lose attitude control. The parameter file contains the 6S settings that I was using during my exciting flight.
What would cause the motors to only idle, without throttling up at all, with a 4S, but then be overpowered with a 6S? Perhaps I dramatically oversized the props/pitch for my motors? I’m wondering whether my motors don’t have the torque at the low end to be able to maintain stability (or go above an idle with 4S?).
Are any of my parameters off or does the build need to be modified, and if so what recommendations?
My component choice wasn’t completely random; I did put the numbers into ecalc ahead of time to check my build, and it didn’t give me any indications that there would be issues.
1300g sounds like a feather-weight for 16inch props. Is 1300g before you add the batteries?
What’s the total weight with each battery set?
Exactly what motors and ESCs are they?
Initially it seems like you could go down a couple of inches in prop size, and/or add some dummy payload.
The odd things is 4S sounds OK for 470kv motors, and 6S seems a bit excessive. Then again 6s seems OK for 16 inch props… More details and we might be able to tell more.
What’s the intended purpose?
In BLHELI32 settings you’ll need to disable Low RPM Power Protect and also Low Voltage protection - ensure your other voltage monitoring system (powerbrick) is accurate and failsafes are set correctly.
Any chance you can set up a serial port with the BLHELI Telemetry?
Anyway, INS_HNTCH_REF was zero, set it to 0.12 (as a guess) at least until you’ve got a stable hover in ALTHOLD and the real hover value is learned.
Okay I went down to 13" props. I experienced the same behavior with the 4S battery: I get an idle but raising the throttle has no effect–just stays at an idle. 6S however seemed to fly nicely this time (from initial impressions anyway). New parameters after my flight and my log file. It doesn’t look to me like hover was “learned” (MOT_THST_HOVER still at 0.2) unless it doesn’t go below 0.2 during learn? Haven’t dug through the log file yet that’s my next task, and I’ll autotune this build with the 6S when it’s not so darn windy.
building this up as a SAR (search and rescue) drone, for BVLOS operations (part 107, with operation waiver, etc, just to forestall that tangent). So I’m looking for best flight time. someday maybe I’ll add a FLIR, when I win the lottery.
yes, current build is 1300g all-up, including the battery (though admittedly it’s a smallish 2000mAh, planning on buying a new larger one but I don’t have it at the moment). In the end I think it will be closer to 2000g, but I reported it as it is right now
t-motor 3110 motors, and a t-motor 55A 4-in-1 ESC
BLHeli is the bane of my existence. I loved it while it worked. Now I cannot for the life of me get it to connect. I get all sorts of connection errors and weird warnings and funky behavior, but it just will not connect. I spent ALL day on it yesterday, unsuccessfully. I’ve tried it on a mac, pc, using passthrough through the FC, and bypassing the FC, using an arduino set up as an interface. No matter what I do, I cannot get BLHeli32 to work now. It worked fine with this exact ESC when I set it up, passthrough, with this setup, now… no love. Come to think of it though, maybe it was with an earlier FC rather than this one. Any advice on that front?
I do have the BLHeli tele set up on the serial port I believe. Just checked and I have motor temps in that log file.
Ah yes, SERIAL6_PROTOCOL,16 for ESC telem. I missed that before even though I was looking for it. Error - not enough coffee.
Definitely use these settings: INS_HNTCH_MODE,3 INS_HNTCH_REF,1
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
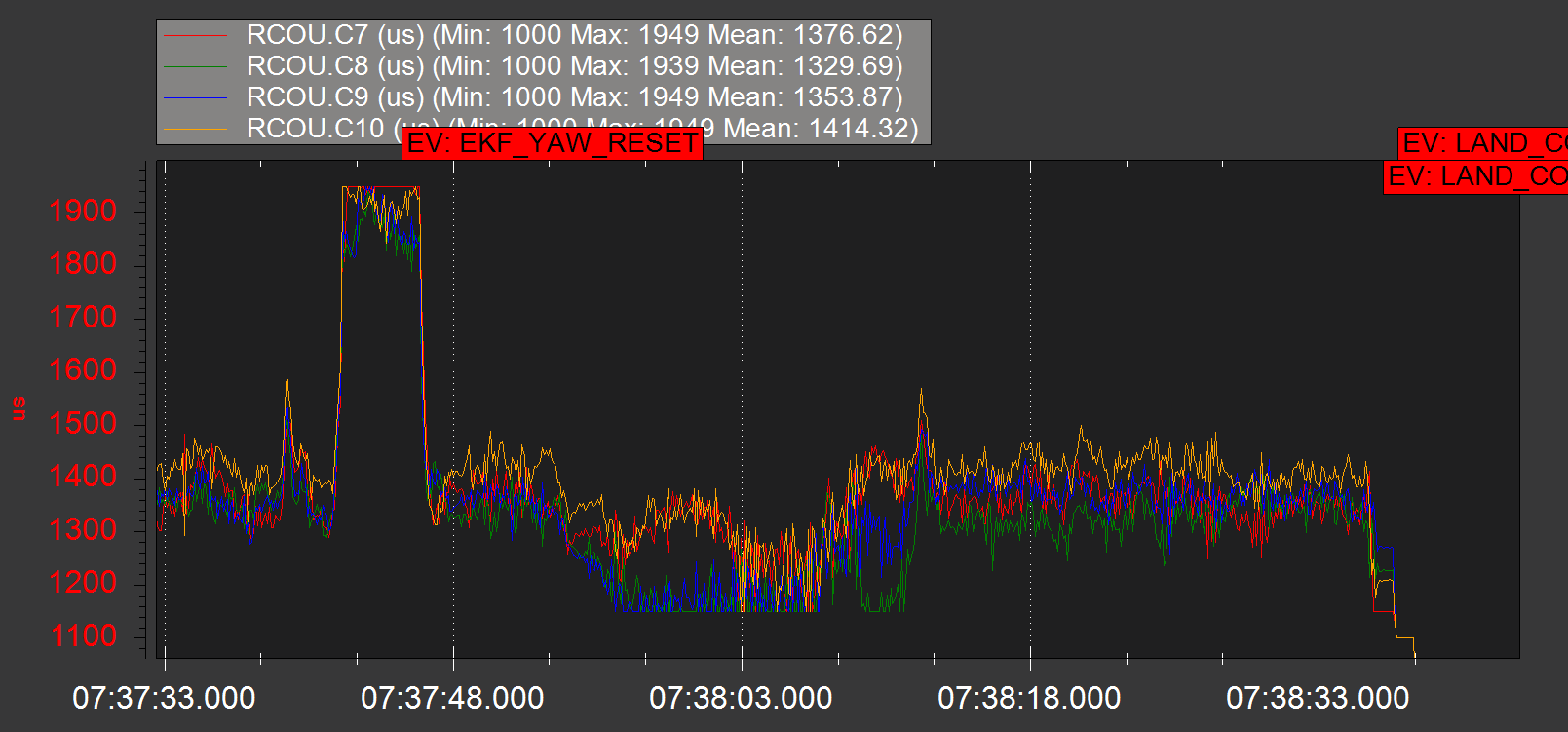
Attitude control looks really good!
I don’t have one of those ESCs to try. I’ve used an old/spare pixhawk set up for BLHELI to do the passthrough sometimes.
15inch props is probably the maximum size for those motors on 4 cell, if the ESC would cooperate, or 11inch on 6 cell. 13inch could be OK and might be a good compromise, keep an eye on ESC temp and actual motor temp.
It does look like 0.2 is the correct MOT_THST_HOVER, time will tell.
Motor outputs are still going to minimum so I would still add a bit of dummy payload, or get a bigger battery
thanks for the notch filter settings–how do you sort those out from the logs anyway?
I see now what you mean from the rc out log values, didn’t know to look for those that’s helpful.
regarding motor hover, it looks to me like throttle is down around 0.1 for hover, is this not the same scale that would be used when plucking out a good hover value from the logs?
I would just hover for a while in ALTHOLD and MOT_THST_HOVER will learn and save. I wouldn’t try to read it off the throttle graph. Do a test flight to verify the value is learnt and saved. It should change a little and wont stay as 0.2000000 - the chances of having all trailing zeros are slim. If it does run out and get a lotto ticket right away
I haven’t used Li-Ion but there is more magnetic interference and you have to always ensure that battery orientation is the same every time. You would also have to run the Compass/Motor calibration - not hard to do but dangerous if done without careful thought.
Li-Ion can give more flight time (theoretically) because of the voltage discharge range, but can weigh more thus offsetting the longer discharge cycle. On a multirotor the value could be limited. Some good implementations have them built into a monocoque style frame for aerodynamics - this would definitely help to offset the weight aspect.
And there’s joining all the cells up into a pack and keeping them working… You can buy them already in packs now.
I would do the numbers in ecalc to compare flight time. In ecalc the battery weight is specified PER CELL not for the whole pack. A quick test I just did shows more load and less flight time for Li-Ion - but this was VERY quick and not definitive!
This is true. I use a Li-Ion on my sub250g quad on occasion (~30min flight time) but there are plenty of EKF errors and the new annoying Yaw error messages with 4.1. It flies, never has crashed but I would be worried on a larger craft flying more $$. Of course everything is packed in tight on this craft so the problem is exacerbated but the point remains.
If you want to use 4S, your optimum motor Kv is 750ish with 13" props
Your 470Kv motors will work better on 6S with at lest a 14" props.
The reason throttle is so touchy is the aircraft is severely OVER POWERED. In this condition the aircraft will hover well below 50% throttle so you have very little “room” between hovering and crashing.
Throwing parts around and tweaking params ain’t gonna fix this. What you really need to do is start over.
Hint: 4 el cheap-o 2112 1000Kv motors swinging cheap plastic 1045 props on 3S will lift 1300 grams easy. BTDT.
What do you want this aircraft to do?
What kind of flight time are you looking for?
Some food for thought:
Tarot 650 Sport Stretched to 682mm
Take Off Weight (g) 3591
Battery Capacity (mAh) 10000
Number of Cells 6
Battery Weight (g) 1200
Battery energy density (Wh/kg) 185
Number of Motors 4
Thrust per Motor @Hover Throttle (g) 897.75
Watts per Motor @Hover Throttle (g) 84.753
Motor Efficiency (g/W) 10.5925453966
Expected Flight Time (min.) 39.290644579
Flight Time with 20% Reserve (min) 31.4325156632
Aircraft Dry Weight (No Battery) 2391
Pixhawk w/GPS
3DR 915mHz Telemetry
TIY-Motor 5008-335Kv Motots
T-Style 1755 CF Props
Tarot Retracts
FlyTron Navigation Strobes
Yaapu Telemetry
6S +12 volt BEC
6S +5 volt BEC
OLED Display
3 Axis Gimbal w/ STorM32 Controller
GoPro Hero 3+ Black
Tarot “Carbon Look” Canopy
MavLink OSD running MWOSD
200mw FPV Video Transmitter
RHCP Clover Leaf Video Antenna
MAUCH HS Series 100A Current sensor.
MAUCH 2S-6S +5 volt BEC.
I think the main thing is to find your ideal long term battery and go with that. The characteristics will change based on the weight and where the CG is. Any tuning, or if its bigger- placement of things, could change based on a different battery. A large battery could also fix your over powered issue as it’ll bring the weight up considerably. Have you done any flight time calculations? That might help you find your battery. For SAR, going to want big. Lots of people more knowledgeable about batteries can help you pick out something