I have been facing a new issue of EKF3 lane switching and the thr hexa copter becomes very unstable in auto mission mode. This only happens with out 10kgs payload on baord. A flgiht without payload auto mission goes normal and no lane switching ekf.
Attzching both logs
First log isnwith max payload where ekf3 lane swirched. Second log. Is wihtout pyaload.
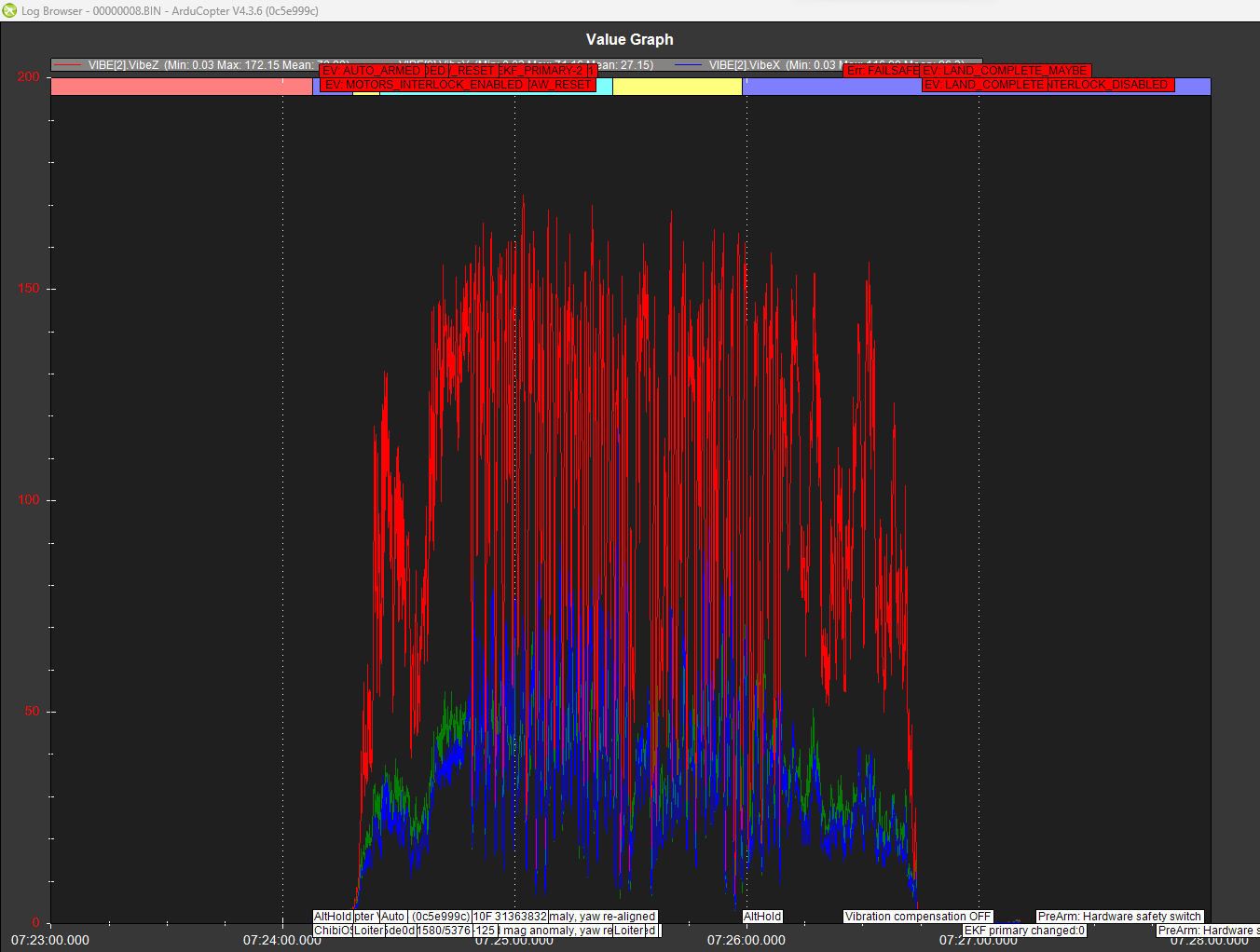
This copter is showing terrible vibration levels in the flightlog with payload…which is the cause of the lane switching. Clipping is off the scale on all IMUs as well.
Even the flightlog without payload shows high levels of vibration…my suggestion is you look to reduce these vibration levels significantly and eliminate all clipping. Once that’s under control a bit of PID tuning will be required as well.
I would also suggest to configure the INS_HNTCH parameters.
The high vibration levels @Clogz noted also caused a Vibration Compensation FS. That will cause the instability as the Altitude Controller switches to a different mode.
1st log . We worked on vibration on x y z by putting the pixhawk on anti vibration damping balls. All lose wires tightned all frame and props etc cross checked.
2nd log we made changes on INS_HTCH_FREQ- 93
INS-HNTCH_BW -46
WHAT SHOULD WE CONFIGURE IN INS-HNTCH PRAMS.
rewuest you to have a look and advixe is viberations are better also there was no clipping in the log file.
Do you suggest we use ekf 2 and not ekf3 for our auto flight missions. Before the firmware update there was ekf3 glitches .
So today total 3 tests flight we did . First two is with 5kgs payload. And last one with 10kgs payload.
First two flgihts details have been mentioned in thia thread.
3rd test flgiht was with 10kgs paylosd and auto mission to check ekf3 glicht and vibration compensation coming on which didnt happen. Flgiht went smoothy without gps or ekf3 glitch. Requesting you to have a look at the logs. We have done our best to resuce the vibraitons. If you could guide us further.
Photos of the drones attached as well. We are using hobby king x8 motor hexa config.
The vibrations are too high, tuning is poor and you need to configure the notch filter and disable the 2nd one. It’s also lacking thrust at the max payload so watch for Thrust Loss errors when encountering a high demand.
For the filter use 46Hz as the center frequency and 23Hz for bandwidth and the MOT_THST_HOVER value for the reference. But, the notch filter is not a fix for the high mechanical vibrations. These should be dealt with before a further attempt at tuning.