hello, i started grid auto waypoint mission. about 17minute a quad drone suddenly spun and dropped at the tree
what is the problem? please any advice me.
thank you.
quad drone
FC : CUAV V5+
fimware : 4.3.6
THIS is log
hello, i started grid auto waypoint mission. about 17minute a quad drone suddenly spun and dropped at the tree
what is the problem? please any advice me.
thank you.
quad drone
FC : CUAV V5+
fimware : 4.3.6
THIS is log
Cant access the log, open up the access to anyone with the URL
sorry. access update now.
Had 3 crashes over the last 40 days. twice with the same flight controller.
Incident 1 - 24th April 2023
flight controller: cube orange + running 4.3.2
Drone takes off in alt hold mode. when flight mode changed to loiter it starts to loose control and accelerates in roll axis at a steep angle with speeds reaching 11.5 m/s and crashes into a stationary vehicle.
Flight log: https://drive.google.com/file/d/1N9XH2_all8dzNc0mX1md6hJQhIKIT80g/view?usp=sharing
Incident 2 - 25th May 2023
flight controller: cube orange running 4.3.2
Mission uploaded. we arm drone and put in auto takes off to about 1 meter and suddenly accelerates in roll axis. immediately motor kill switch engaged.
flight log: https://drive.google.com/file/d/1I-zDqD4YrX3HmU681XzLBW7VNTowBesd/view?usp=sharing
Incident 3 - 5th June
Flight controller cube orange + running 4.3.2 (Same flight controller as the first incident)
Takes of in loiter modes loses control pitches steeply and accelerates. kill switch engaged.
Flight log https://drive.google.com/file/d/1gsuBAufOda4hBCm3w1NzdZVKqti5sPZg/view?usp=sharing
Video: Drone crash due to EK3 error (Arducopter 4.3.2) - YouTube
The same flight controller and drone were involved in 2 incidents one on 24th April and again on 5th June. after the initial crash the drone was repaired and flew normally with about 15 hours of flight. In all 3 cases it had something to do with EK3. So as a precautionary measure I disabled EKF3 and enable EKF2. Will keep guys updated if anything else pops up.
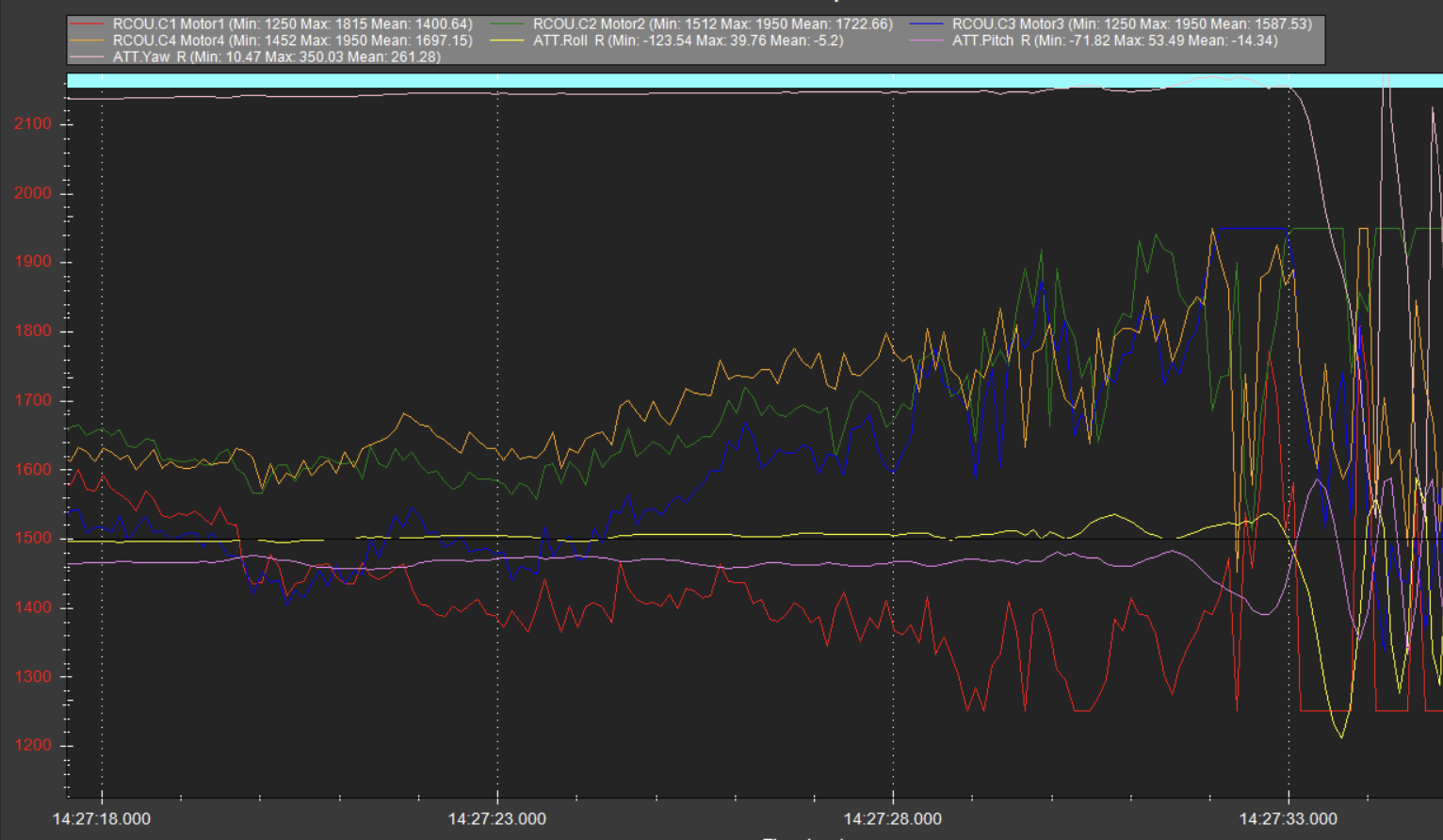
I think this is like a weight shift towards back left (away from Motor 1) since motors 2, 3 and 4 all start increasing output, and Motor 1 is dropping output. A couple of big battery packs could do this if they came unstuck.
The alternative thought was a motor mount twisted, BUT then I would have expected to see Motor 2 output dropping a bit more like Motor 1. We also dont see yaw affected as much as pitch and roll is affected, at least not right away.
Because none of the motor outputs are going straight to maximum output and staying there, I’m ruling out a desync or motor/prop failure.
I believe a contributing factor is the tuning. Stability was easily lost, but in the end attitude control would probably have been lost anyway.
The battery voltage failsafe levels arent set, and nor is the failsafe actions.
The motor/battery voltage scaling is not set. I suspect the Min/Max PWM range is wrong too.
Almost everything is on defaults (which could work in some cases, but not really with this copter) and minimal tuning has been done.
Before the incident there was a weight bias to the rear, there could have been better balance but this is not critical.
Hi Prathyush,
Can you please start your own discussion for those issues?
Then you could delete your post here I think, or at least edit out all the content.
Thanks
I’ve been analyzing it today and I think you’re right.
In the photo at the time, the motor 2 folding arm was unlocked.
This seems to be the cause. It is right?
Yes that could be it
hi my drone has a crash and had the signal “ekf3 switch lane 2” I was able to switch the primary and such but this popped up… can you help please?
Posting in multiple threads with the same issue will not produce results for you. It was already stated in your previous post, by another ID (bad practice that), that the cause of the crash had nothing to do with an EKF Lane switch.
Your start on the forum is not conducive to recieving the help you are asking for.
I never said the problem was the EKF, we already got past that. My question is what do I press or how do I move forward from the picture. If you’re not willing to help just don’t respond. I’m trying to get this situated so I’m not in this situation anymore. my drone guy is on vacation which I respect so I came here because it seemed like genuine help.
I wouldn’t waste time if I didn’t need help for real
You are wasting the limited posts on new user accounts by arguing. Change the compass priority as already suggested. Use the arrows in Mission Planner to put the external compass first.
Again, Discord might be more helpful since there isn’t a post limit, and users/developers in Europe/Asia will likely be active over the coming hours.
Please stop posting the same issue more than once, and, as I already stated, you need a modicum of patience.
I downloaded Discord can I get the link to the chat?
You posted in a thread called EKF3 lane switch after you “got past that”.
I would try a Google search for “ardupilot discord” and click the top link…
I already linked it in the other topic.
Yea I saw that 4 hrs ago. And 1 hr ago the ask for the link.
Note: @susiee2 @sussiee The craft crashed due to a Thrust loss which has nothing to do with the compass priority. Those errors came after it was going down. I only mentioned them, as I said incidentally, as one of several things that need to be addressed on your craft. Obviously the priority is the thrust loss if you want to get it flying again.
It’s best to start a new thread in the forum category it belongs in rather than tagging on to 2 others. Are you really running Arducopter 4.0? I see that you are not so neither of the threads you posted in are right. Delete the text in both and start a new post.