I noticed that in arduplane EKF3 and EKF2 does not without GPS but it started in arducopter after starting autopilot. i need EKF for calculating accurate roll, pith and yaw in VTOL FW during hovering without GPS . also i think by losing GPS we need EKF.
How can i change the parameters or ardupilot code to enable EKF without GPS ?
I think @moreba is just trying to use Plane without a GPS attached and he doesn’t need autonomous flight, just manual flight.
I don’t think anything needs to be done @moreba. The EKF is always enabled and it will provide roll, pitch and yaw without a GPS. If you really wanted to completely disable the use of the GPS by the EKF you could set EK3_SRC1_POSXY = 0, EK3_SRC1_VELXY = 0.
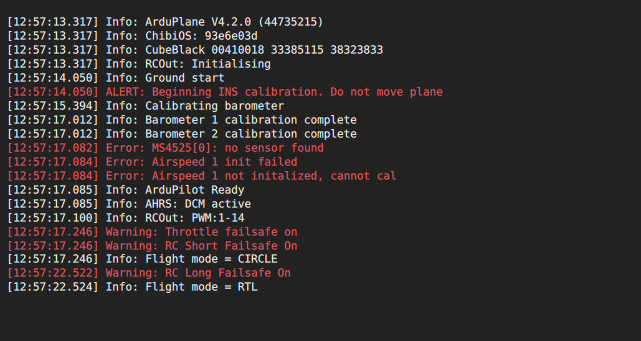
I think in arduplane when i don’t use GPS EKF not enabled or not using. because after fast movement of autopilot by my hand and put it on desk roll and pitch are not zero. also in qgroundcontrol software i don’t receive AHRS EKF3 active and tilt alignment complete messages.
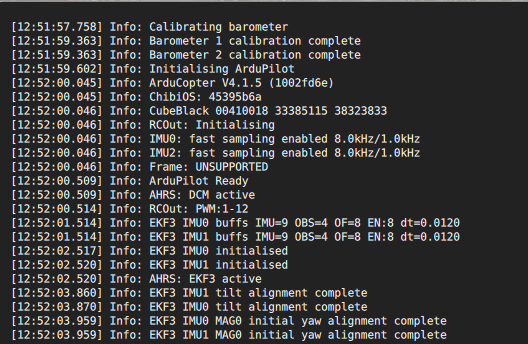
I changed those parameters and did not affected. in arducopter without GPS EKF3 works but in arduplane without GPS EKF3 dont works but i need it.
Is there a solution for this issue ? I am trying to fly without compass and GPS. The idea is to only use the IMU to stabilize the plane. But I am getting the issue “EKF2 not started” (I switched to EKF2 since I don’t have the GPS).
To fly without GPS (nor airspeed sensor) in Plane, here’s what I did.
Set AHRS_EKF_TYPE to 0 to force DCM (sorry) - this means you aren’t using the EKF.
Disable STALL_PREVENTION otherwise your roll will be limited to 25 degrees regardless of ROLL_LIMIT_DEG
Disable GPS arming check
Enjoy!
PS - Auto Trim won’t work in DCM if you don’t have airspeed or GPS. Don’t bother trying, you must manually trim.
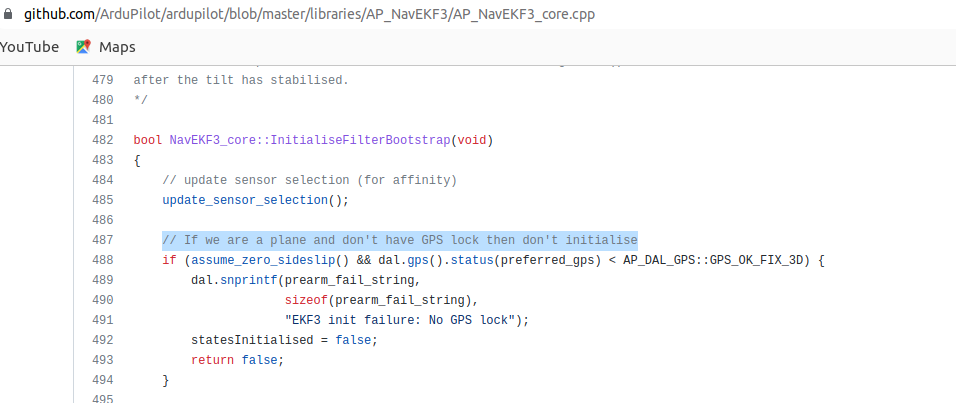
It’s a pretty strong assumption the EKF has a GPS on Plane. There’s ways to get around it, but it’s more work than most people care for if they just want to use ArduPlane for FBWA.