Firmware : Arducopter 4.3.8
FCU: Mateksys H743
EK3_RNG_USE_HGT 70
EK3_RNG_M_NSE 0.5
EK3_ALT_M_NSE 1.0
EK3_SRC1_POSXY 3
EK3_SRC1_VELXY 0
EK3_SRC1_POSZ 1
EK3_SRC1_VELZ 0
EK3_SRC1_YAW 1
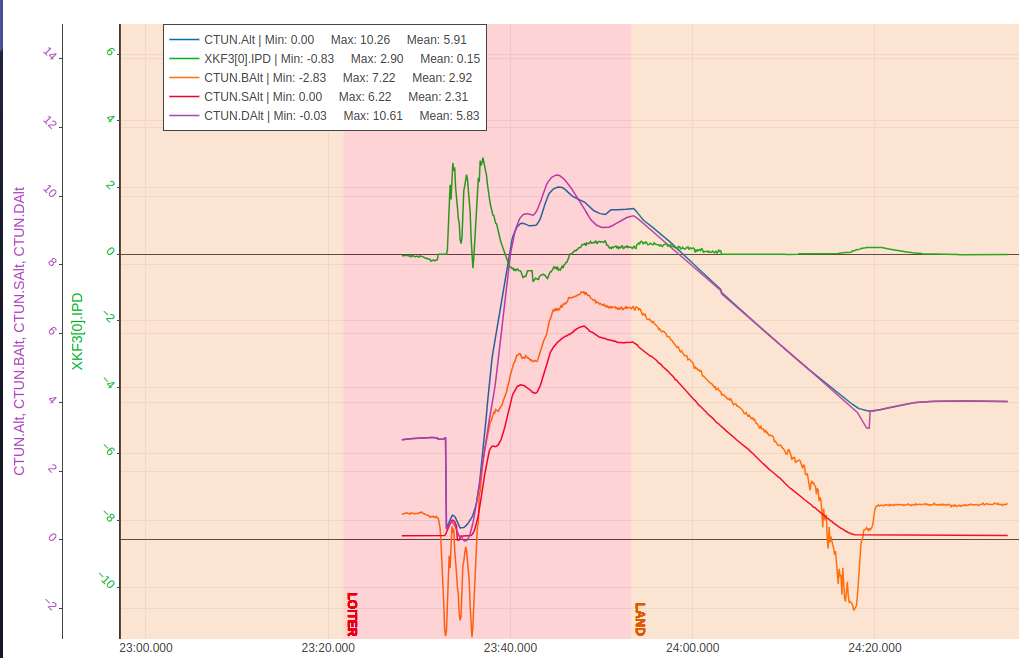
Why the innovation in altitude within the EKF. spikes or sustained deviations here indicate disagreements between sensor measurements and the EKF’s predictions when takeoff ?