Hello,
I am using PX4Flow and Lidar Lite v3 with Pixhawk.
I am getting an error “EKF2 IMU0 has stopped aiding” on MP. This error comes sometimes and then disappears. I tried flying the quad. But the quad had a very strong drifted forwards, right after takeoff in Loiter mode. Another time, the quad was flying as expected in loiter mode but suddenly drifted again (strong drift).
The error does not come when the PX4Flow is disabled.
I also tried by recalibrating again but no luck.
Everything was working fine. The quad had some drift so just tried to focus the PX4Flow feed a little. Though did not change since the focus was fine. After that, this error is being shown.
Well, this is a complicated challenge, especially when flying indoor.
You can add additionnal compas on the I2C line and try to install them (just like the one on the GPS) far from EMI like motors.
I am using both EK2 & EK3 and this error does not really impact on the flight performance, unless you have very bad OF quality , for this you have to checks on the logs.
For now, I changed the EK2_IMU_MASK to 2 i.e. using only one imu, loiter is working quite okay.
But when I kept EK2_IMU_MASK as 1, the orientation on MP was haywire (random orientation, speed, and height). So, I used the value as 2 and tested.
But now there are issues with maintaining a constant height. But I don’t think these are related.
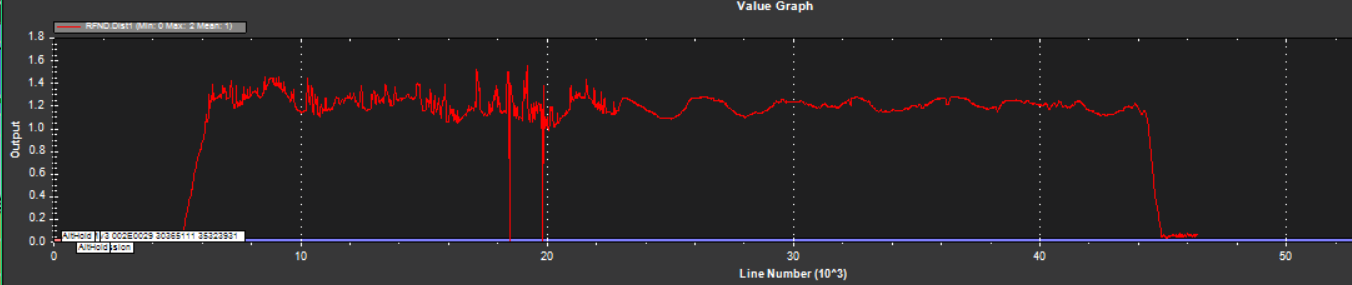
You need to look at the logs, all the sensors are recorded and you can analyse if there is a fault. I would look at the baro parameter vs rangefinder altitude for any discrepancy.
And another doubt, @ppoirier.
I was testing loiter mode with PX4Flow. Loiter is working at 1.5m around but there is drift at higher heights 2m around.
On searching, some had suggested that there may be a problem with incorrect focus hence unable to detect features. But the problem still persists despite checking the focus. Is their any other tuning parameter that can be changed to solve the issue?