Im running AC 4.2.1 on CUAV V5+ with dual gps setup on hybrid engine hexa copter.
Gps 1 is Neo V2 pro CAN GPS
GPS 2 is Neo V2 serial gps.
Both the gps placed at well enough distance and more height from other electronics.here is the reference picture.
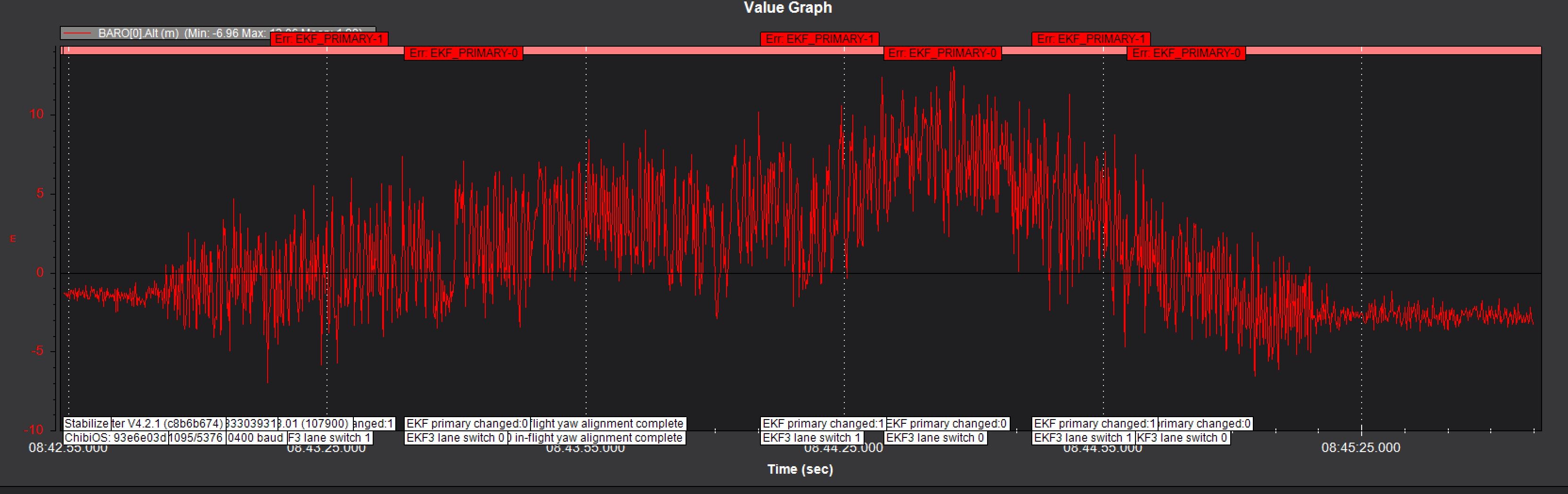
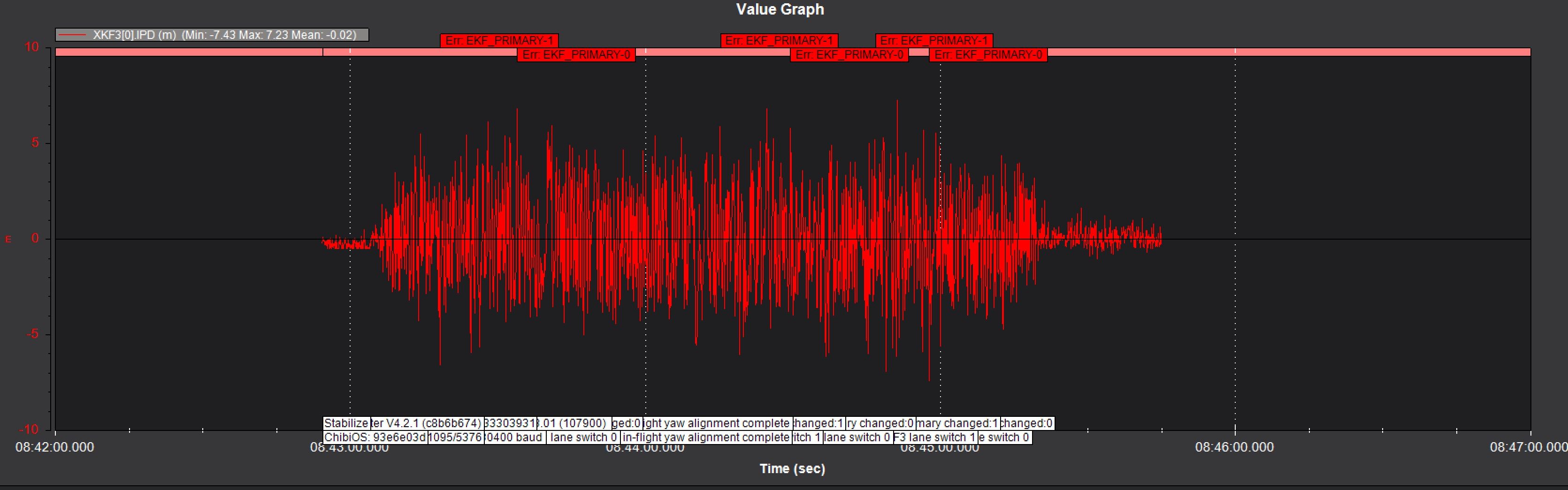
When i start to fly always getting EKF pos( vertical) ERROR .as result EKF3 always keep switching the lane and EKF primary always changing.
There is no chance of compass interference from external source.
RM3100 compass set as priority one and IST8310 compass set as second in priority which in neo v2 gps.
I have disabled internal compass of CUAV V5+ .
Please find the log here along with mission planner screenshot shows that EKF keep changing Hybrid engine EKF Issue - Google Drive
Not sure but it looks noisy to me and the Innovations are high. Is the Lane change causing any problem other than a message in the log? Out of curiosity, and may not be at all related, but how did you calibrate the Compass’s? Magfit hopefully?
I have similar more model and some of them has same kind of problem but some others are flying well…i could not find the reason for this issue.
Lane change doesn’t cause any problem but just wonder and afraid what it could cause while flying…
Compass calibrated in normal way as all axis complete one 360 degree untill it reached 100percentage…i have got well fit value around less than 10 in both the compass.
I would use Magfit thru MAVExplorer and enable the Compass Motor Correction also Magfit
It’s easy. Fly around with a lot of Yaw movement, give it some throttle, land and run it.