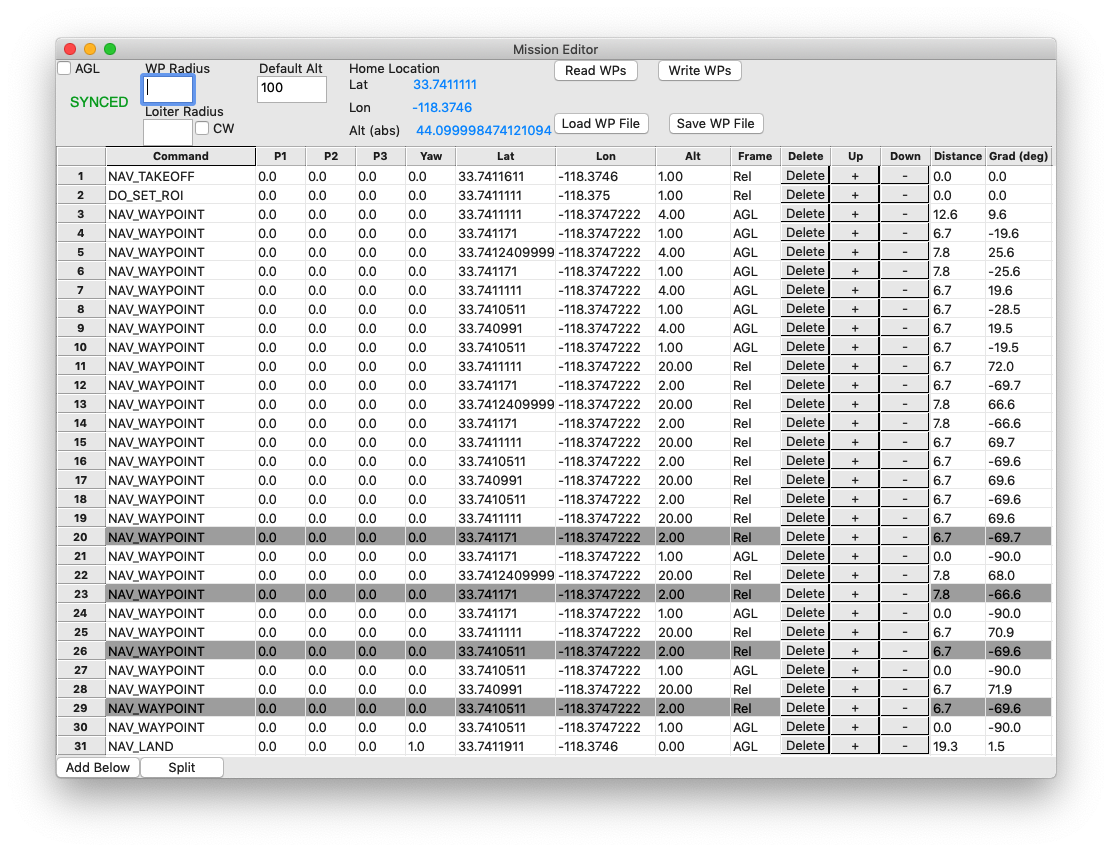
You hit the nail! Thinking in terms of a “straight line” suggests the solution: before any Terrain waypoint from a Relative one insert a Relative one with same lat/lon coordinates, and height within rangefinder reach:
QGC WPL 110
0 1 0 16 0 0 0 0 33.74113111 -118.3746000 44.0 1
1 0 3 22 0 0 0 0 33.74116111 -118.3746000 1.00 1
2 0 3 201 0 0 0 0 33.74111111 -118.3750000 1.00 1
3 0 10 16 0 0 0 0 33.74111111 -118.37472222 4.00 1
4 0 10 16 0 0 0 0 33.74117111 -118.37472222 1.00 1
5 0 10 16 0 0 0 0 33.74124111 -118.37472222 4.00 1
6 0 10 16 0 0 0 0 33.74117111 -118.37472222 1.00 1
7 0 10 16 0 0 0 0 33.74111111 -118.37472222 4.00 1
8 0 10 16 0 0 0 0 33.74105111 -118.37472222 1.00 1
9 0 10 16 0 0 0 0 33.74099111 -118.37472222 4.00 1
10 0 10 16 0 0 0 0 33.74105111 -118.37472222 1.00 1
11 0 3 16 0 0 0 0 33.74111111 -118.37472222 20.0 1
12 0 3 16 0 0 0 0 33.74117111 -118.37472222 2.00 1
13 0 3 16 0 0 0 0 33.74124111 -118.37472222 20.0 1
14 0 3 16 0 0 0 0 33.74117111 -118.37472222 2.00 1
15 0 3 16 0 0 0 0 33.74111111 -118.37472222 20.0 1
16 0 3 16 0 0 0 0 33.74105111 -118.37472222 2.00 1
17 0 3 16 0 0 0 0 33.74099111 -118.37472222 20.0 1
18 0 3 16 0 0 0 0 33.74105111 -118.37472222 2.00 1
19 0 3 16 0 0 0 0 33.74111111 -118.37472222 20.0 1
20 0 3 16 0 0 0 0 33.74117111 -118.37472222 2.00 1
21 0 10 16 0 0 0 0 33.74117111 -118.37472222 1.00 1
22 0 3 16 0 0 0 0 33.74124111 -118.37472222 20.0 1
23 0 3 16 0 0 0 0 33.74117111 -118.37472222 2.00 1
24 0 10 16 0 0 0 0 33.74117111 -118.37472222 1.00 1
25 0 3 16 0 0 0 0 33.74111111 -118.37472222 20.0 1
26 0 3 16 0 0 0 0 33.74105111 -118.37472222 2.00 1
27 0 10 16 0 0 0 0 33.74105111 -118.37472222 1.00 1
28 0 3 16 0 0 0 0 33.74099111 -118.37472222 20.0 1
29 0 3 16 0 0 0 0 33.74105111 -118.37472222 2.00 1
30 0 10 16 0 0 0 0 33.74105111 -118.37472222 1.00 1
31 0 10 21 0 0 0 0 33.74119111 -118.37460000 0.00 1
(Incidentally, I changed the low W Relative points height to 2m because in practice this seems reliable. YMMV).
I think I tried some similar insertion in the past (possibly not 4.1 yet), without success.
So this is the final video:

Note the transitions.
The PIP (up right) doesn’t show now the RTL trace.
I hope to try the real thing shortly.