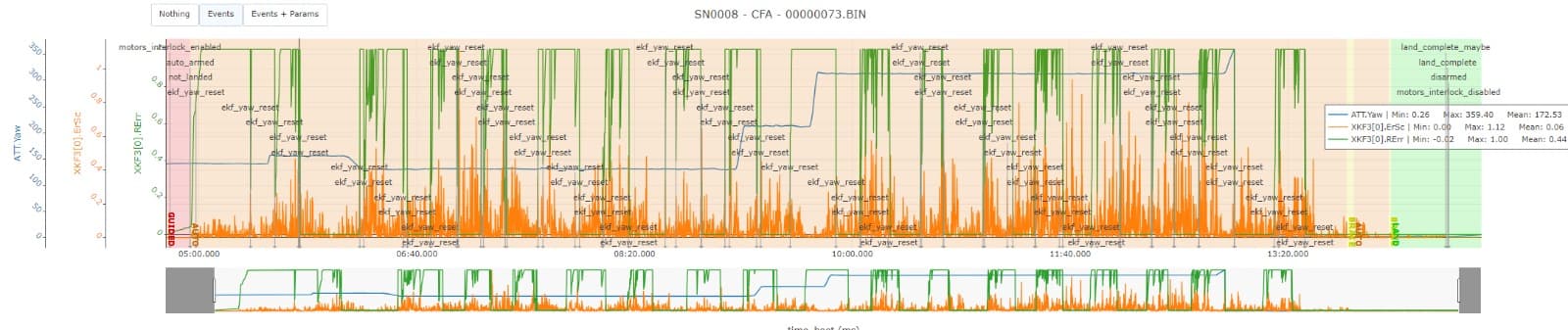
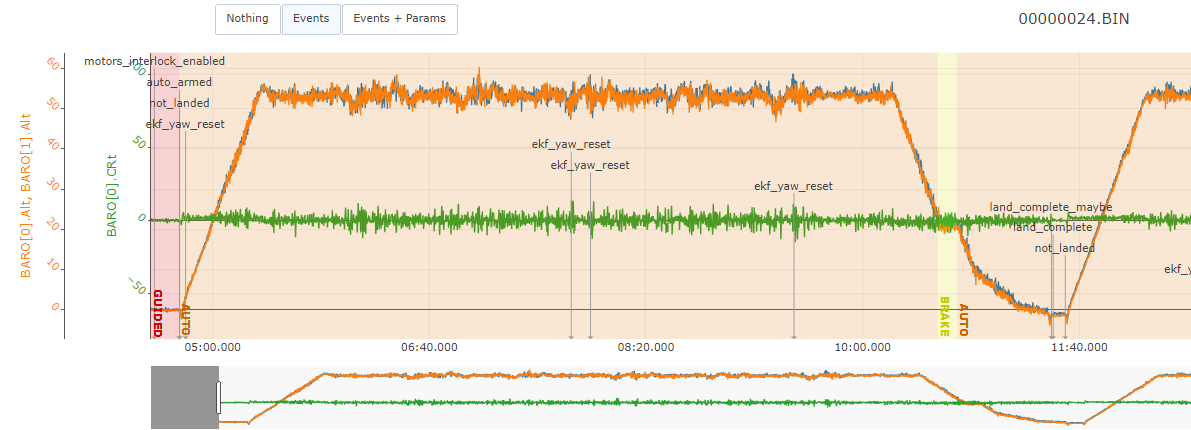
I looked at the latest log I could find in your folders, 64.bin
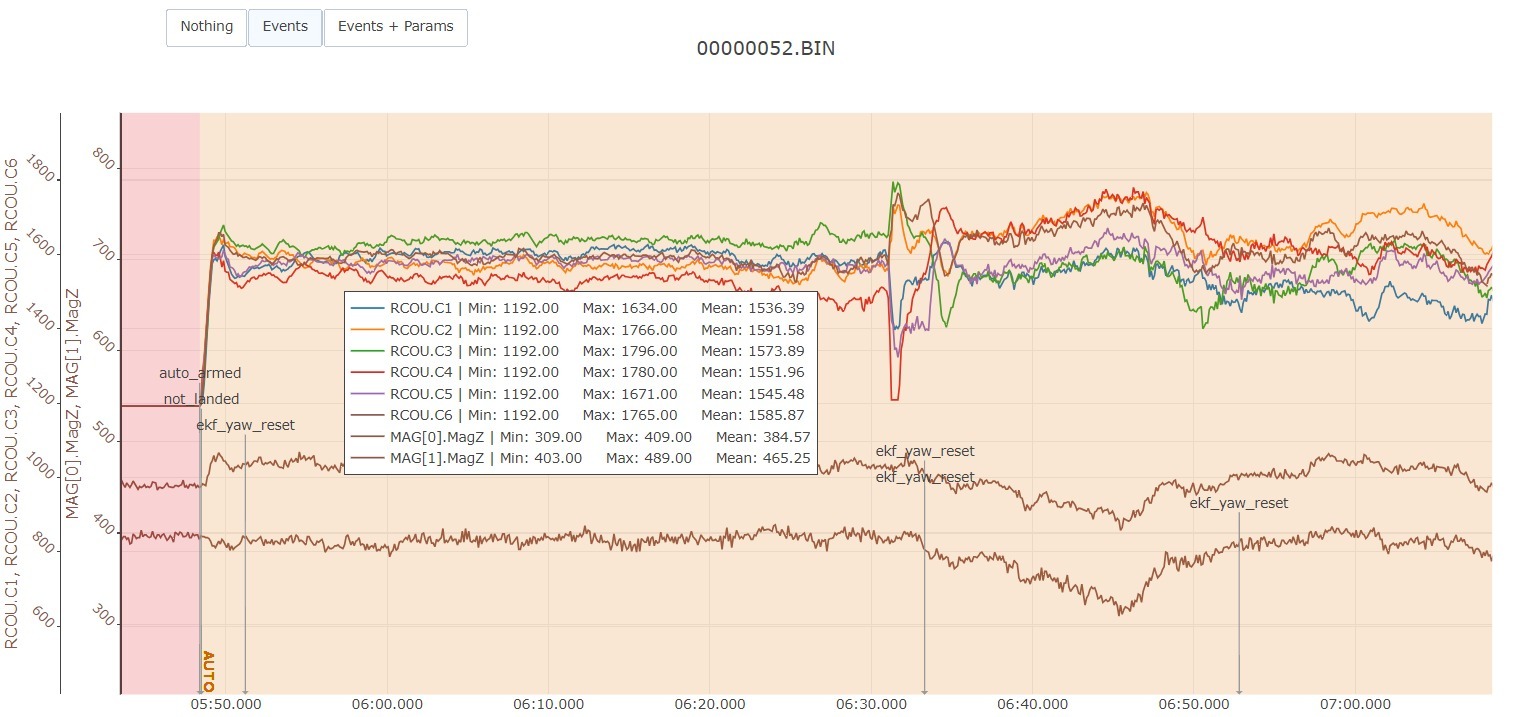
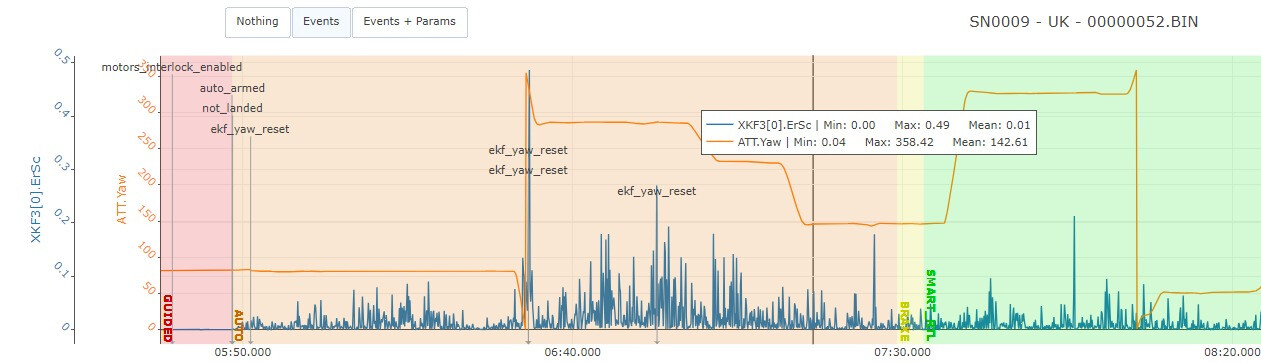
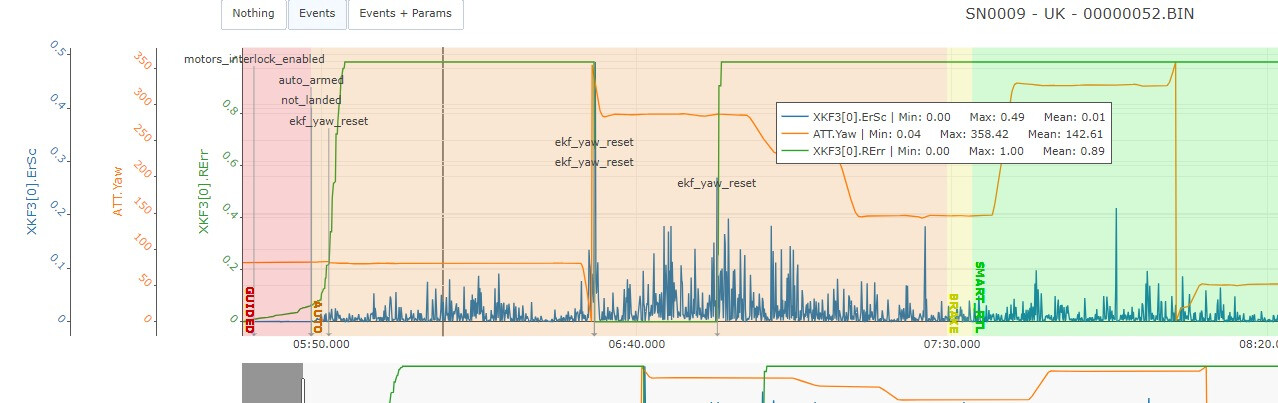
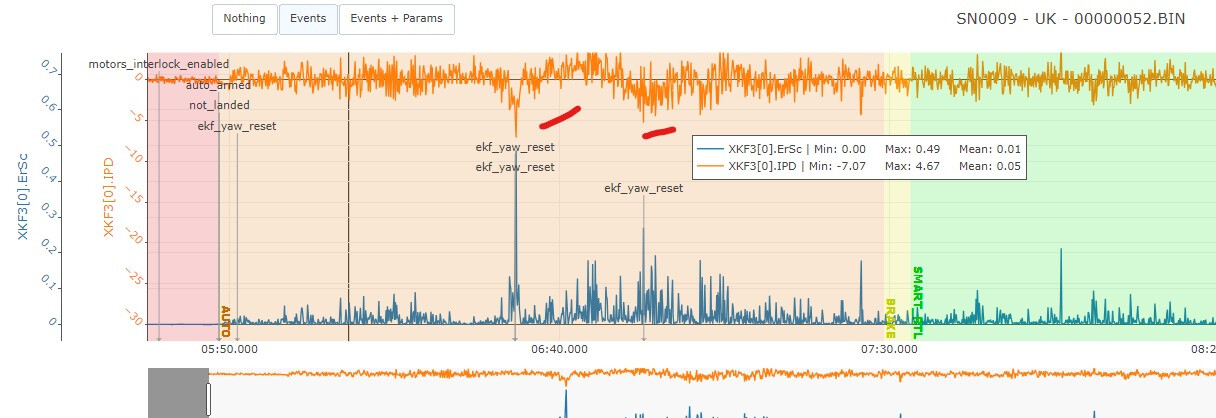
I dont see the EKF lane switches in that log, mainly precision landing
You will have to be more specific otherwise.
You should definitely update to latest stable firmware (now 4.3.7) - there have been some important control loop and timing fixes (amongst many other things) since the version you are using.
I wouldn’t change any EK3 params until tuning is better (as per below) and we can better identify where the real problems are.
Vibrations are low, so that should not be a problem. I think there is still noise in the system because the harmonic notch filter is not working as good as it could. This will allow Autotune, or even manual tuning, to work much better.
Adjust these to improve the harmonic notch filter:
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,38
INS_HNTCH_BW,20
INS_HNTCH_FM_RAT,0.7
MOT_THST_EXPO ?
What motors and ESCs do you have? There might be a slight improvement here.
I would also reduce your D terms to:
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_D,0.005
Use these to improve the GPS position, since the GNSS units are not giving equal quality signal, maybe due to interference or different firmware versions.
GPS_PRIMARY,1
GPS_AUTO_SWITCH,4
There could still be improvements to your compass calibrations, if you can do a flight with circles and a figure8, plus some ascent and descent. Just use AltHold or Loiter. We can use that with MagFit. I think this has been discussed before, but I’m sure we can do more.