Hello team, i have made 2 UAV models with all same components and structure both the frame are identical. Still 1 unit is flying smoothly but the 2nd unit has some random issue of EKF lane switch after 4-5 minutes of flying and the drone crashed with motor thrust loss. This issue i have not faced a single time with the 1st frame. it would be very helpful if any of the expert can help me. i m attaching the log file in the drive folder
link
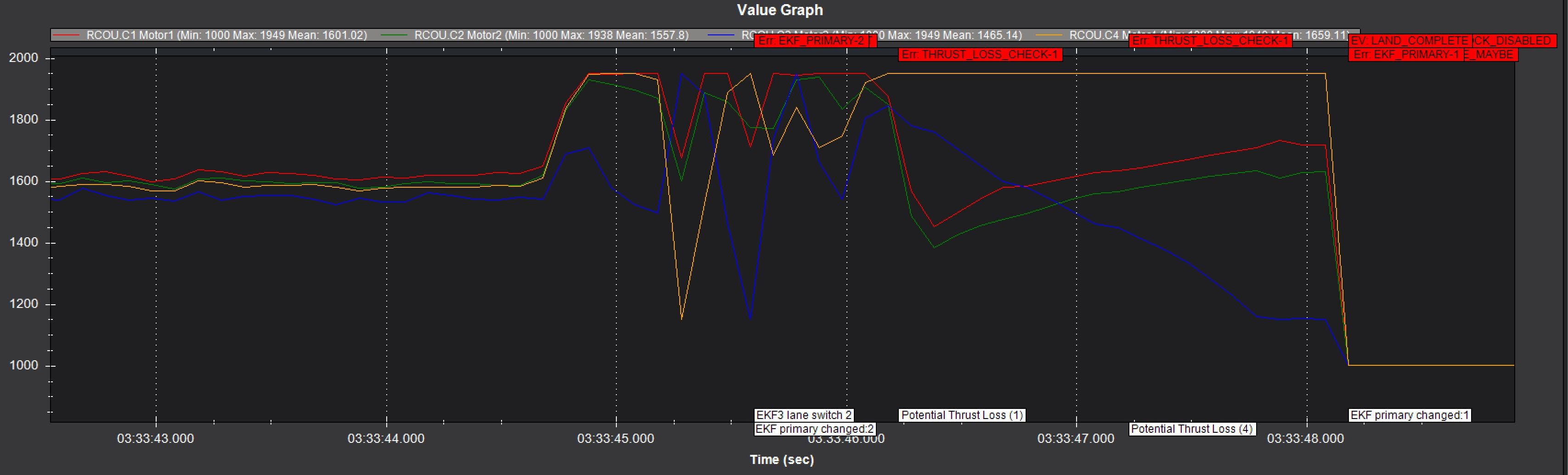
The event causing thrust loss came before the lane switch with 3 motors commanded to max. You are asking for trouble configuring for Dshot1200. I would set that to 600. RPM from ESC telemetry or BDshot would be interesting to see but you don’t have it.
And updating to ArduCopter 4.3.6 is a must.
hii, i have updated the firmware with 4.3.6 then also its happening. i have attached log file with 4.3.6
Hii Dave, as i m new in this i not able to properly understand your expertise. i think you are asking for the telemetry data for the crash?
Would be waiting for your reply
No, just saying to not use Dshot1200. Configure for 600.
Hii dave, i have used Dshot 600 but still the drone crashed