Just had a scary situation where an EKF lane change caused the vehicle altitude (POS.Alt) to jump drastically. This is also the altitude which is reported in the GLOBAL_POSITION_INT MAVLink message, which I was using to navigate the drone in Guided mode.
The jump in altitude was because the two EKF cores had very different origin altitudes. However, it was my understanding that this altitude should remain consistent regardless of EKF origin (ie, it should be relative to the EKF origin currently in use). @rmackay9 I hope you don’t mind the ping, but this seems like unintended/undesirable behavior.
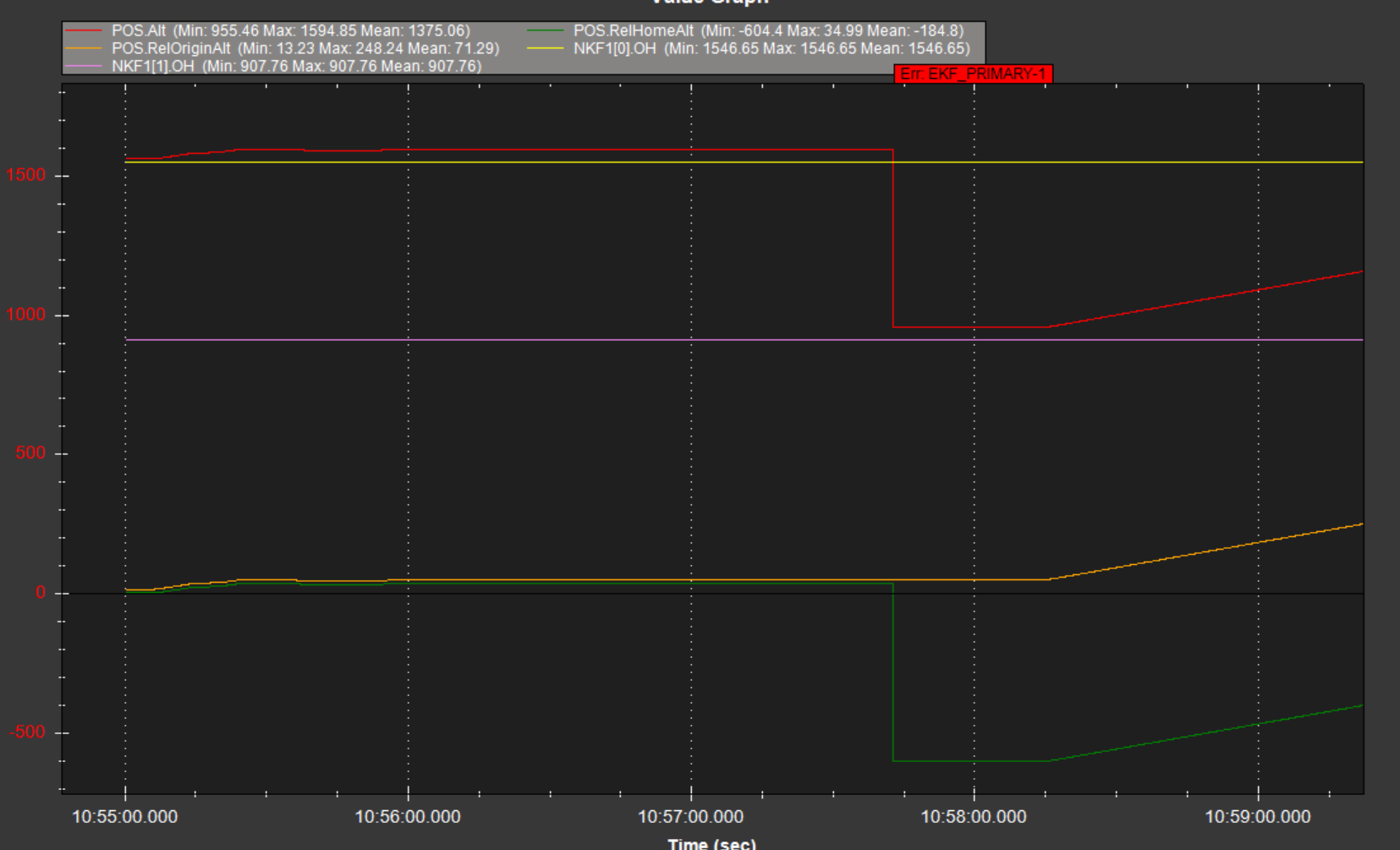
To be clear, when the EKF switched lanes,
These altitudes changed:
- POS.Alt
- GLOBAL_POSITION_INT.alt
- POS.RelHomeAlt
These altitudes did NOT change:
- POS.RelOriginAlt
- CTUN.Alt
- CTUN.BAlt (and BARO.Alt)
- NKF1.PD (for both cores)