Ok, so I have been fighting with this copter for a couple months. It flies well. It just that my video from Althold, Loiter or PosHold is jittery, especially in forward flight. Still jittery in backwards flight but not as bad. Even in hover there is some Jitter…
PID’s PID’s PID’s Been up and down the scale… I can change the feel but nothing realu changes my jitters in any mode that involve AtlHold…
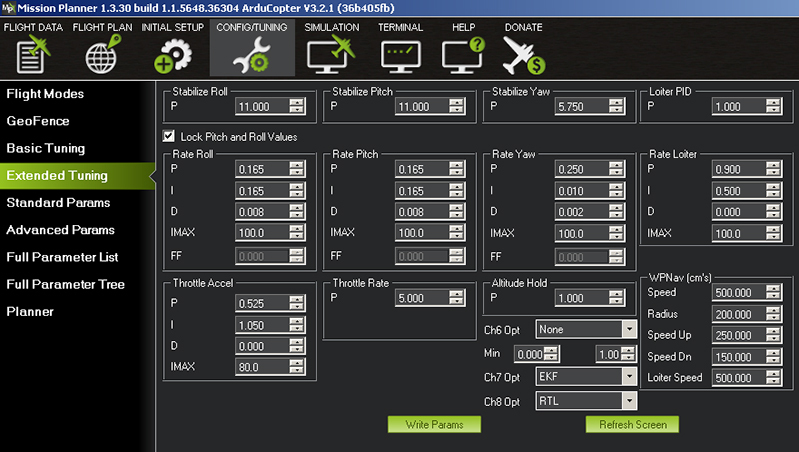
So, I stumbled on EKF and LOw and behold it was not turned on. So I programmed my Chnl 7 switch so I can toggle in and out of it.
Took off this morning, (not ideal winds 12-15mph but they are only gonna get worse for the next few days…) As soon as I went into PosHold the copter dropped 2-3 meters, (see log) and recovered. Then it was kind all over the place…
I was so hopping that EKF would be the answer… And maybe it still is? Seems to me in any mode that involves AltHold that Baro noise is causing jitters…
I have more logs that are not EKF enabled if you like…
I read that EKF is default in 3.3 Is firmware upgrade in order? Can EKF be tuned better in 3.2.1
If I do have to upgrade, What do I lose, PID’s, cals, all?
The log does not contain anything conclusive, no RCOUT, no IMU logging.
You need to get it tuned, not in windy conditions.
Then you should expect it to hover fine, in any case hold altitude fine. - that should be the simplest thing.
EKF can smooth things out, it can save the day under certain circumstances, but it is not an excuse for poor parts or tuning.
You might as well disable it for now - just to be sure you can get it to fly properly without first.
Think of is at “garbage in, garbage out” - even if EKF can make something fly better, the result would be mediocre comapres if the thing flew fine first, then got EKF enabled.
People have been Flying ArduCopter for a long time before EKF even was an option, so try to find and solve the problems first. It is not an EKF problem if the UAV does not behave well before it was switched on.
Thanks for the response… It does fly fine… If not for the camera footage, you’d think it was perfect. In Stabilize mode I have very smooth video. Only when AltHold is in use that I see bumpy video. In forward flight it is the worst. Backward gets smoother. Left and right is smooth at times… I have tuned and tuned and tuned on PID’s From sloppy hard to control to super snappy and tight… But the bumpy video is sort of a constant through it all…
Props are balance. Motors are balanced, Vibrations are low…
This morning, EKF was all over the place. It dropped 6 or 8 feet when PosHold was engaged and then very sloppy holding position. Landed and went back to EKF off and it flew well even considering the wind.
Also, (in PosHold) the copter loses altitude in forward flight and then rises at the end of the run…
SO, I guess my question remains. Does EKF require tuning in this version? I read in 3.3 it is no longer an option. Is that a better version or the same as in my version of firmware?
Yes, 3.3 have plenty of EKF improvements - but do not start running an release candidate on something that is not 100% good, unless you are very experienced.
AltHold should be fine. you may have a tuning problem - OR - your AP may be mounted in such way that drag/wind influence it’s pressure during forward flight. . try all other directions. or to shield it even more from wind and try the same. Or post to-the point logs of simple test flights. Like : arm, get to 10mAGL , Alt-hold , fly in an even speed 30m ahead, stop for 10 sec, back up to start point in same speed.
You should log you BARO and expect it to show what happened (if it shows 10m all the time while the copter descended , then the wind is the problem)
Notice the yaw hunting a bit… And sometime forward is not quite forward… So, I did ESC cal tonight… Read somewhere the Yaw floating around could be ESC cal related… Maybe part of the problem…
With props off I checked by feel motor balance. Most a re very quiet, there is one I can feel some very slight vibes… I don’t think it is the cause but I’ll fix it at some point…
Also, vehicle armed with no props, I can here a “clunk” on some motors as they change speed…
Will check motor mounts before re attaching props…
Thinking of leaving the carbon fiber off and putting plastic on…?
I apologize for the high shutter speed on the video… Camera was set for shooting stills… Woops…
The test flight video, FC was wrapped in a double wrap of porous foam tape I found in my old Army first Aid kit… Both top and sides… I would think it would dampen any wind noise getting to the baro?
You notice when I start forward out of PosHold, there is a shimmy…
PID’s from test flight Vid…
I am getting to my wit’s end… Not sure what to think any more…
seeing your video - I don’t think it’s the UAV that is the main problem, as much as the gimbal/gimbal mounting /gimbal damping solution.
the yaw needs better tuning.
Ok, so you where right Spent a lot of time on the gimbal… Probably the biggest thing there was gimbal power was too low causing slop in both axis… Removed 8 of 12 ball dampers on the gimbal and things are getting better…
 Spent a lot of time on the gimbal… Probably the biggest thing there was gimbal power was too low causing slop in both axis… Removed 8 of 12 ball dampers on the gimbal and things are getting better…
Spent a lot of time on the gimbal… Probably the biggest thing there was gimbal power was too low causing slop in both axis… Removed 8 of 12 ball dampers on the gimbal and things are getting better…