Hello, I am following the basic Software in the loop tutorial: https://ardupilot.org/dev/docs/rover-sitlmavproxy-tutorial.html#
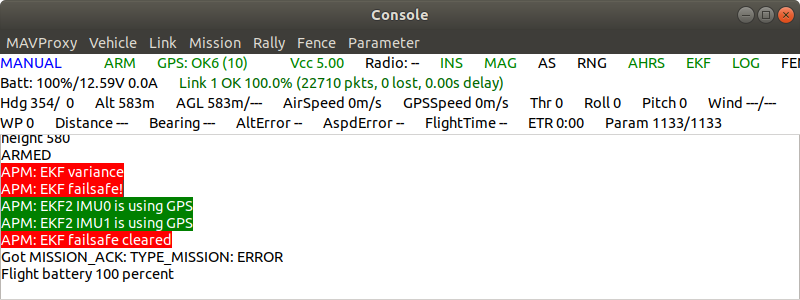
After writing arm throttle , I try to set a position with right click, and say fly to , but keep getting the failsafe error. What could be the reason? There is no hardware.
Thank you,