However, when it drives along the waypoints in automode, sometimes it’s suddenly stopped due to the EKF failsafe ? Is it because of the hardware issue of the compass ?
It looks like this vehicle is actually running Rover-3.5.2. This category is really for 4.0 beta testing. In any case, it does look like the vehicle is suffering from some significant compass interference or perhaps it needs to be recalibrated after some change in the things mounted on the vehicle.
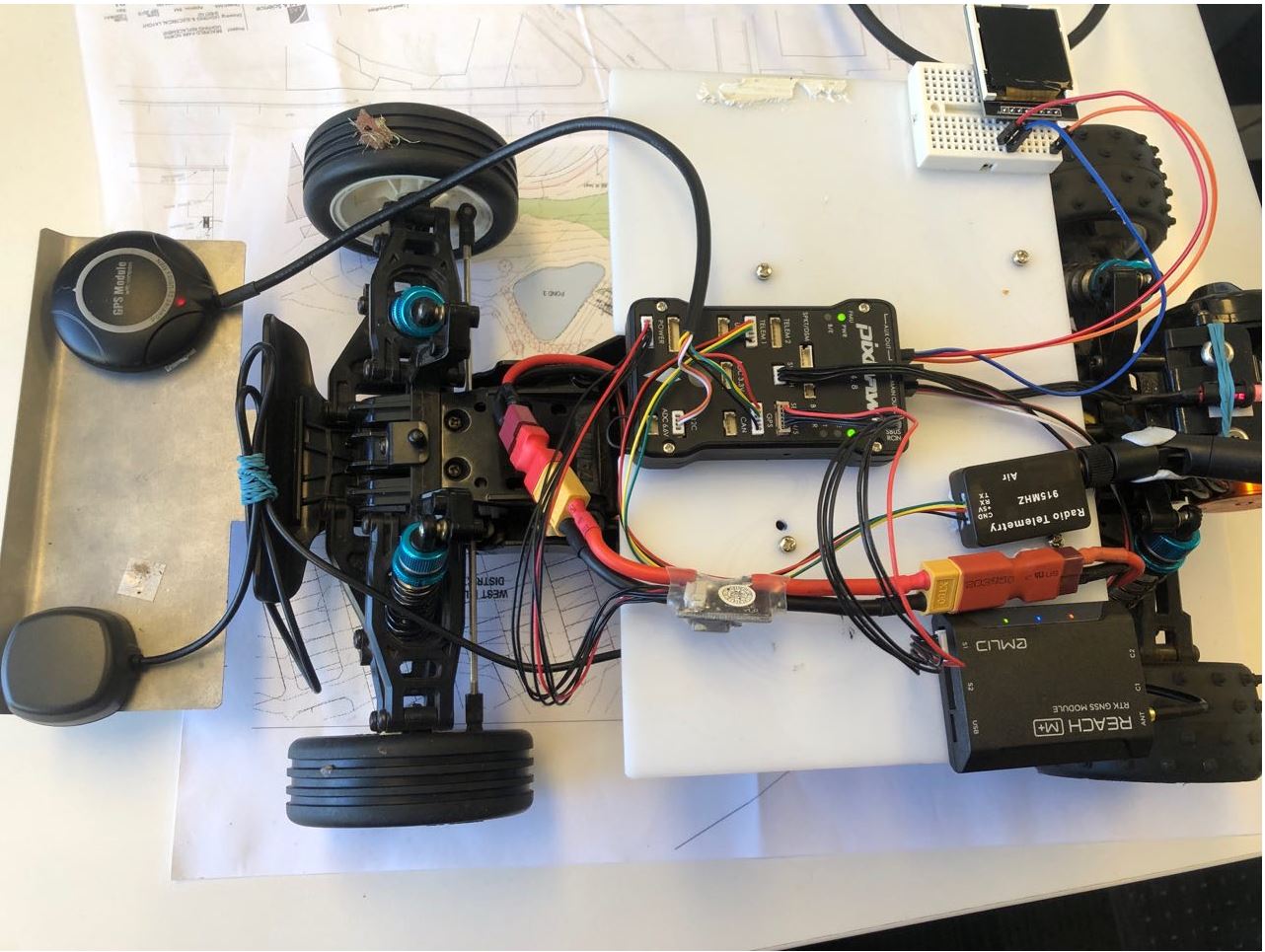
From the picture it looks like the GPS/compass is mounted on a metal plate on the front of the vehicle? That close to metal is probably not a good idea. Mounting it away from metal objects would be best.
Thank you @rmackay9
Where do you think will be the best location to mount the compass in this case ?
I can’t mount it using the raised plate as it will cast shadow on the light sensor that will be installed later and affect the measurement result.
Also is there any external compass that can reduce the effects of interference ?
Ideally it would be attached to a GPS mast and mounted close to the flight controller… basically up and away from sources of interference is best. If that’s to difficult perhaps just raise it up off the metal plate by mounting it on a little box. If the plate is iron it might help to replace it with a non-magnetic metal like aluminum. Anyway… just some ideas.
I just solved this problem by changing to another GPS+compass module. But another problem is when the rover reach the last waypoint, the GPS status will change from RTK fixed to 3D dgps. At the same time, the Reach M+ will also lose the connection with my iPad. Do you have any idea why this happen ?
I noticed the second GPS statues suddenly drops while the vehicle was driving.
Also the vehicle is supposed to stop few seconds at every waypoint, but for some reason, sometimes the rover just drive through the waypoint without any stop