I’m testing a Holybro H-RTK F9P Rover Lite receiver.
My goal is RTK operations. I’m using a F9P receiver on my base - and sending corrections with Mission Planner. (stable version - not beta)
On my first test flight with RTK corrections, the copter achieved “FIXED” accuracy as soon as the copter gained about 10 meters altitude. I continued the climb to 100 meters and never reverted from “FIXED” TO 'FLOAT".
About half way up in the climb, a GPS glitch occurred but recovered quickly. Later in the climb more glitches occurred that eventually resulted in an EKF Failsafe.
I’ve conducted about 10 flights without RTK corrections, and receive no glitches.
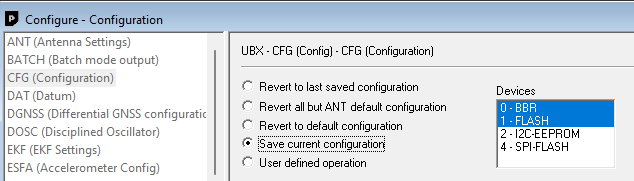
Looking through the parameters, the only possibility I could think of was the baud rate. The Holybro docs say that the receiver defaults to 115200. The mavlink messages in the BIN log show that the F9P connects using 230400 baud. My serial3_baud was set to “38” for 38400 baud. I’m guessing that the ublox parameter for baud on the receiver is set to 230400 and ArduPilot simply adjusted to that.
To be sure there weren’t issues with a mismatch, I reset serial3_baud to “230” so it would match the receiver’s baud rate.
A subsequent test flight resulted in numerous gps glitches that would likely have resulted in a EKF failsafe had I not discontinued the flight.
The only other change I made was I changed the FS_EKF_ACTION from “LAND” to “ALT-HOLD”.
I continued making test flights without RTK corrections - and received no GPS glitches.
This Holybro F9P receiver is a new piece of equipment, and I had to move the wires on it’s 10-pin GH connector to a 8-pin GH connector (removing the 2 safety switch pins) so that it would connect to the Cube’s carrier board. So my first suspicion was the receiver, the connection, or the configuration.
But since there are absolutely no glitches in non-RTK operation, I’m suspecting a problem in the Copter firmware - or possibly, Mission Planner.
I’ve uploaded bin files to Dropbox. They all have the option set to record before arming.
First test flight with RTK corrections - resulting in EKF failsafe:
Second flight with RTK corrections showing multiple GPS glitches:
Sample test flight without RTK corrections - no GPS glitches:
Thank you for any comments or assistance!