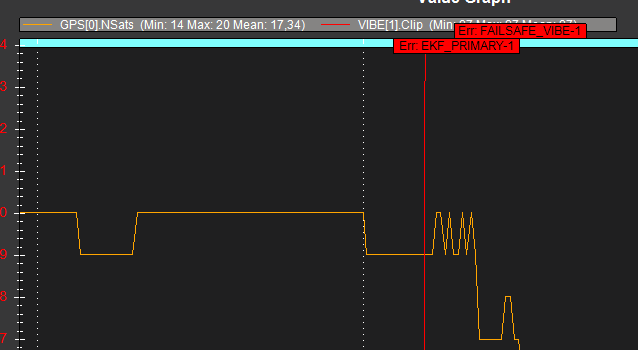
Hi. I had an unpleasant incident while testing auto-takeoff and autoloading. At takeoff the craft immediately banked backward and flew a few meters before hitting the ground. It is a 800 size with gas motor and happened so quick that I barely had time to react. Just before takeoff, an EKF Failsafe event was triggered. According to the log file it seems to be a combination of NSats that quickly alternate x8 between 19 & 20 satellites and a sudden pulse in VibeZ. I normally takeoff in Stabilize mode before transitioning to Auto but was testing the capability to do a full Auto mission. Arducopter work very well and my complements to Bill and the Ardupilot community for making this overall a very satisfying experience. I am currently running v4.3.4.
My question is how to safely (1) abort or even better (2) prevent a bad mission if something goes wrong with takeoff or landing like this. I have All selected in my ARMING_CHECK. Incidents happens so fast that there is barely time to react. From reading the Wiki, an EKF failsafe action was supposed to be trigger to Land, but as this was at the time of takeoff, the mode stayed in Auto. Will an aboard to maybe AltHold mode be better? As I am transitioning to Herelink, Stabilize Mode does not work well with the small joysticks. A situation like this with larger helicopters can be potentially deadly. Instructive feedback will be appreciated. Thank you.
Ok, sorry about the crash but there are few things not right here at first glance:
-Flight control on those dampers is a no-go. You are very likely engaging a resonance on that board when the rotor hits the first resonant frequency during spool-up.
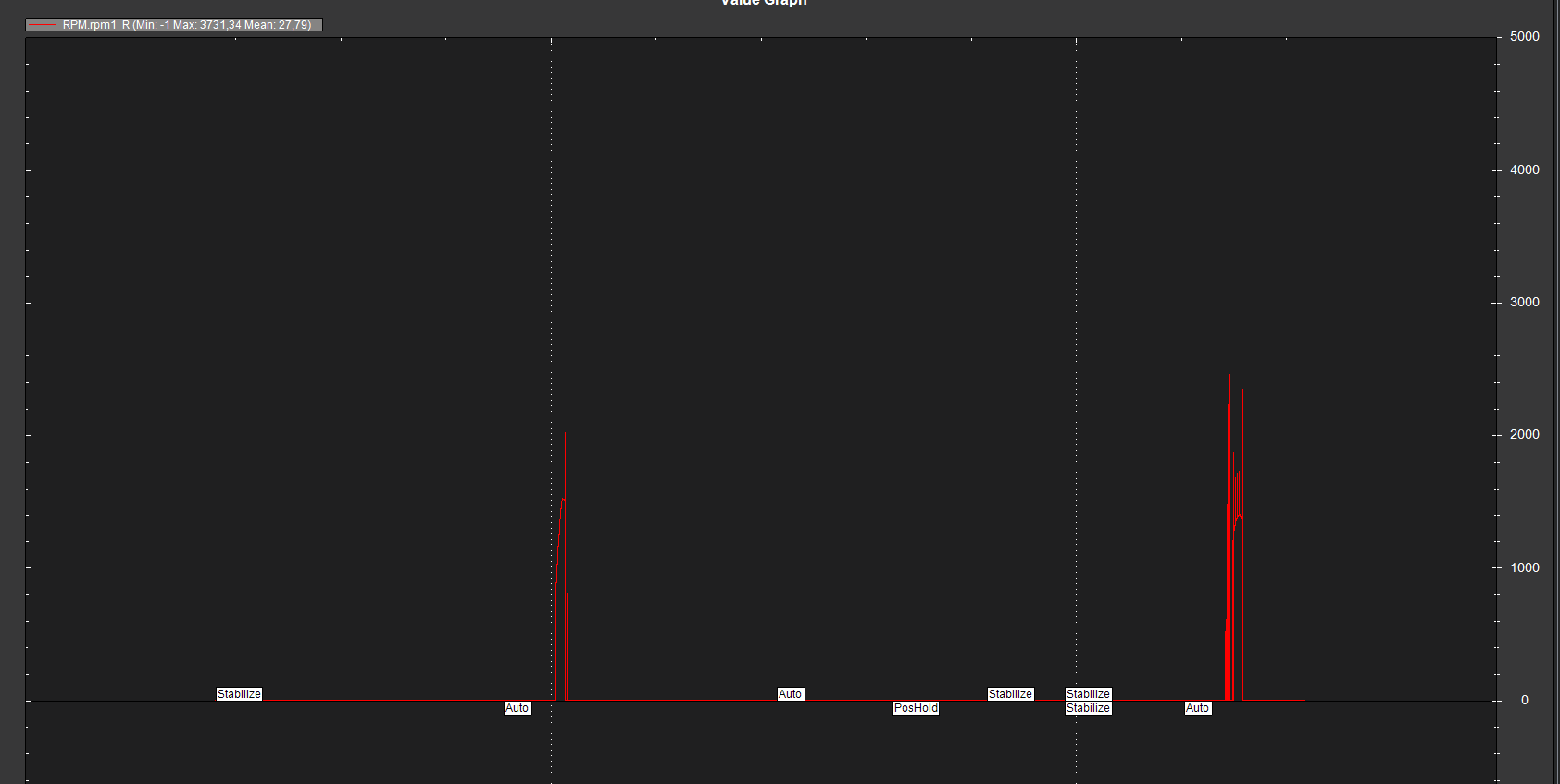
-RPM signal is not working good, which sensor are you using?
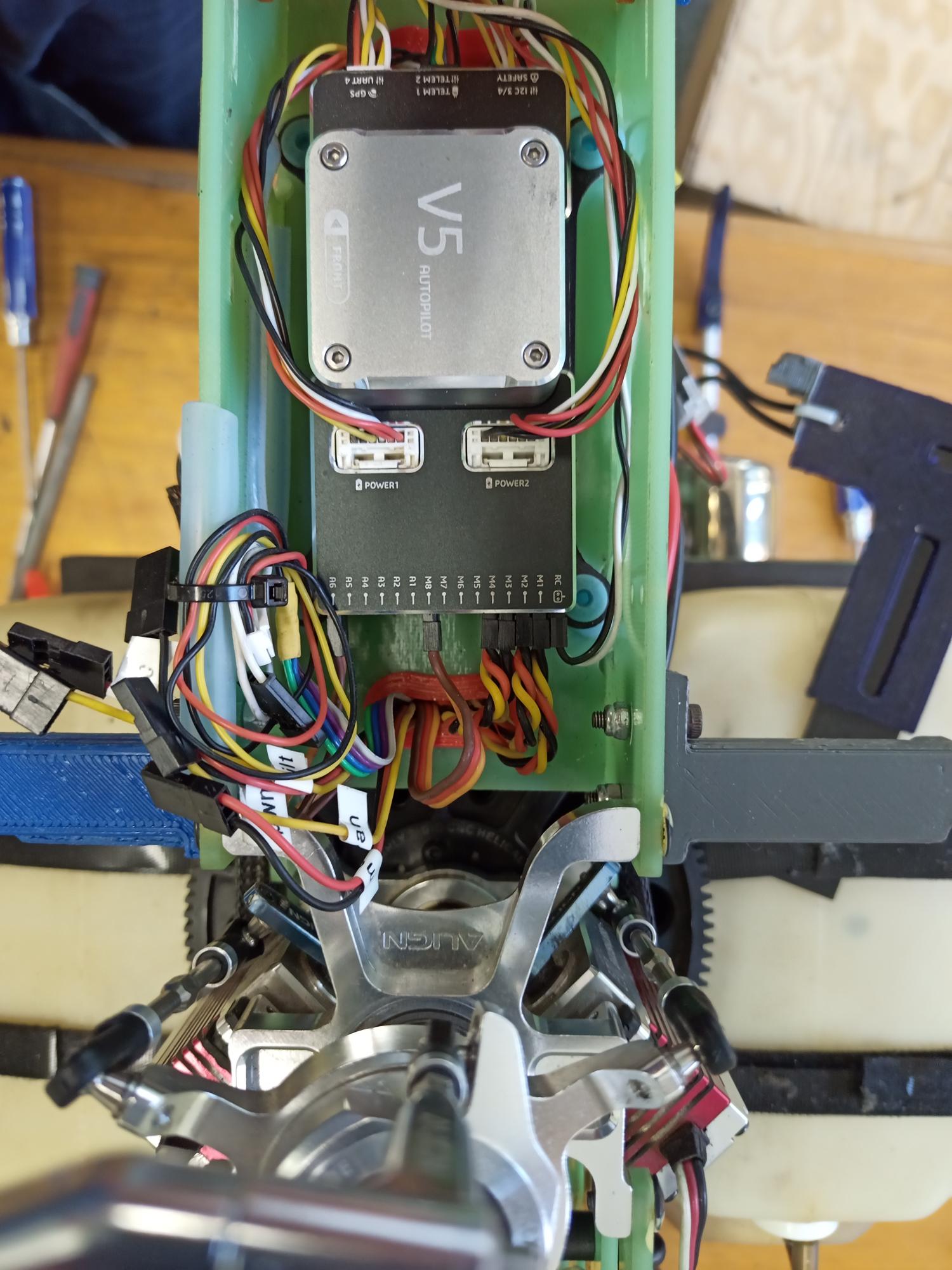
-I guess GPS is mounted “hard” on the tail boom?
I will hopefully provide more answers later today.
Yes, it takes a few moments to emotionally process this. Thank you for your observation regarding the dampers and resonance. My reasoning for the dampers is the cube setup on the gasser, and from preventing it from long term damage due to vibration.
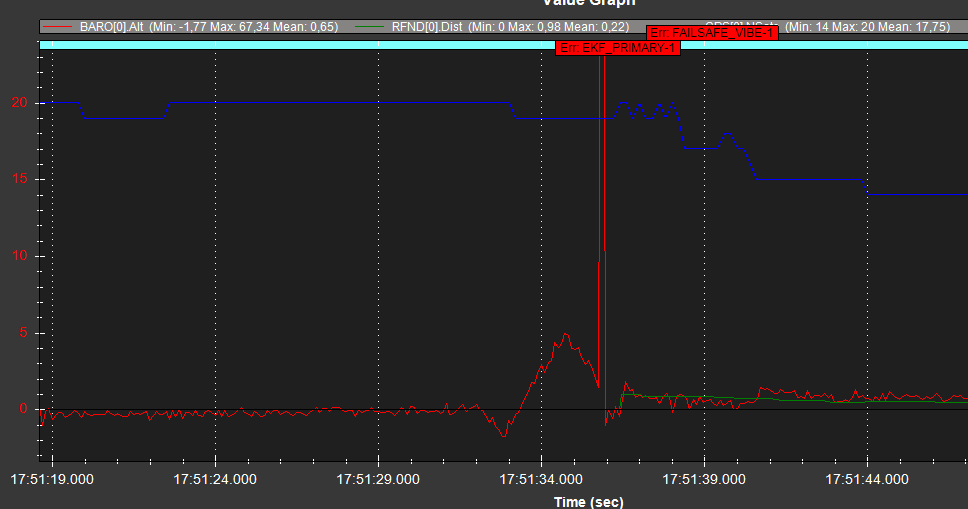
And yes, for some reason, the RPM signal was not good. It is an Align/BeastX Hall sensor, and since upgrading to V4.3.3 I had a lot of problems with it. I eventually used an Arduino Mini to intercept and clean the signal. It was previously working perfectly but looking at the log file for this test, it was horrible. Regarding the GPS - it is hard mounted right in front of the MC, approximately 10cm in front and above. I did noticed a discrepancy between the barometer and the rangefinder. Before takeoff, there was a sudden jump of 5m and then 67m.
The incident seems like a Swiss Cheese model where a contributions of a few things aligned to create the perfect storm.
Here is a screen print with the graph of the barometer, rangefinder and NSats. There was a sudden jump of up to 67m before takeoff, comparing to the value of the rangefinder of 0cm.
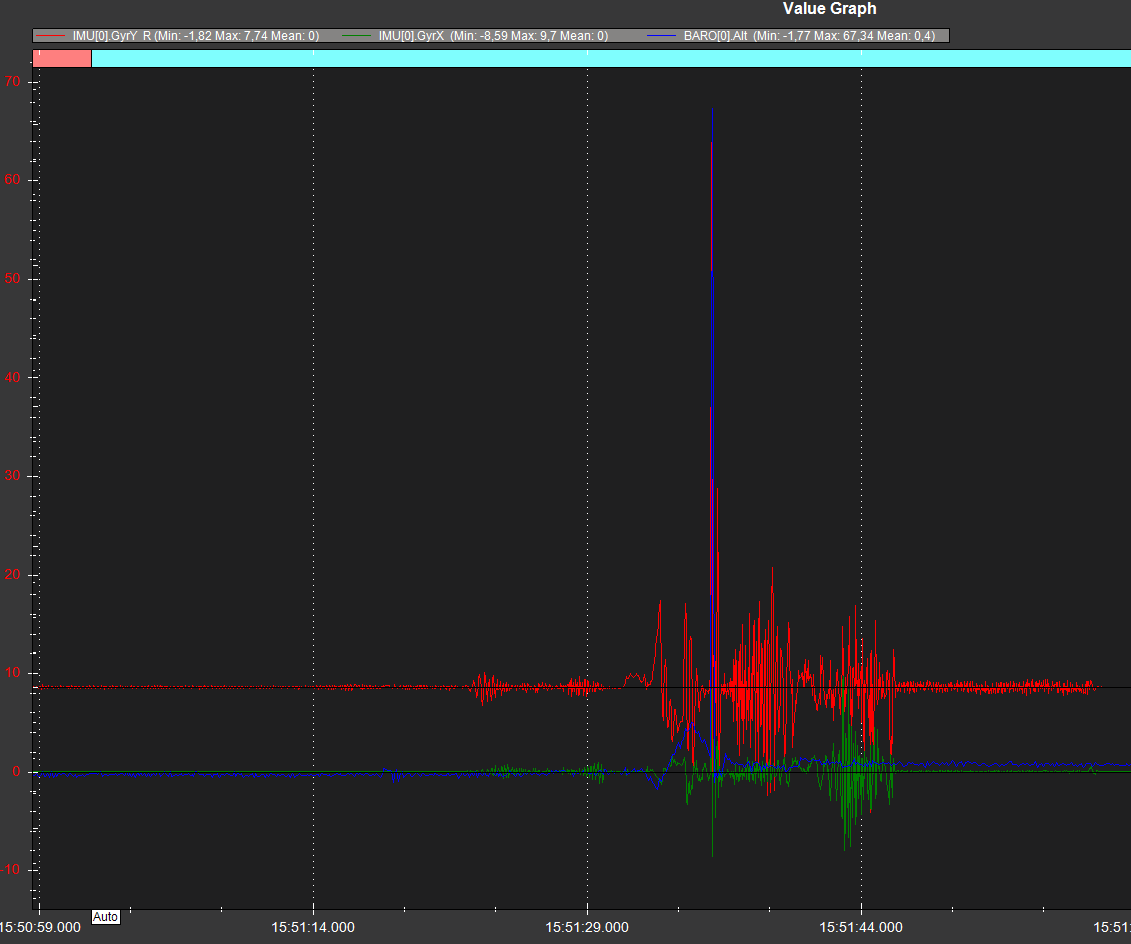
The flight controller was almost certainly shaking badly, look also at gyros going nuts while baro went skywards, this is the root cause of the accident (the sharp attitude changes you witnessed is a consequence):
Anyway, Auto flight mode should only be selected once the rotor rpm are in range and stable (gassers are more prone to issues like this during transients), while it looks like rotor spool-up was performed in Auto straight away:
I would advice to isolate the GPS/MAG from the airframe (thick bi-adhesive foam should do the job) and redesign the autopilot mounting ( I would give a try mounting it directly with thin bi-adhesive pads and look what the vibes/gyros reading are doing)