Situation:
I have successfully flown my VTOL several times, but this time, just before landing, I encountered an EKF error. When I transitioned from FBWA flight mode to QLoiter, an EKF error appeared on the H16 Pro screen, and the mode changed to QHover.
I looked through the log and found too many compass swtiching
The strong current flows directly beneath the FC, as it is mounted on the top side of the power distribution board. Additionally, I noticed that the XT90 plug becomes hot after the flight, which means too much current, so I suspect that it could be the cause of the EKF error.
I was with the same scenario, the difference was the wind.
The wind was enought to ensure the airplane was over the q_assist and then was flying great.
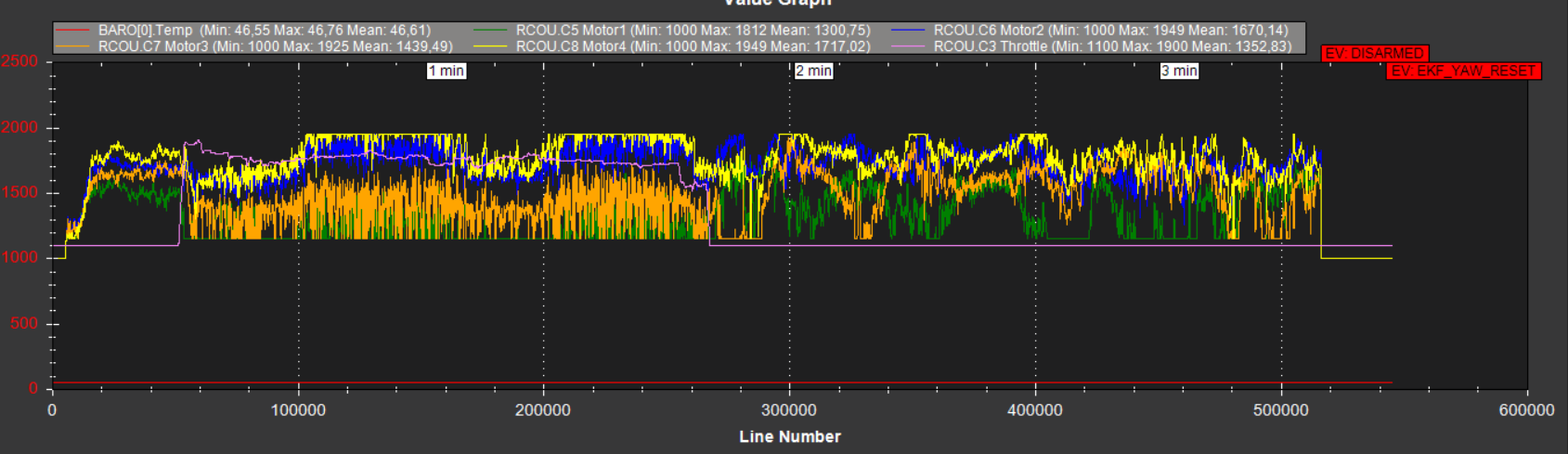
One day without wind and I was with this same behavior of all motors running together.
I found the airspeed disabled and after enabled the airspeed everything is back to normal and all is working.