One thing I notice is that the compass orientation is “8”. On a pixhawk with an external compass it’s normally zero assuming the arrow on the GPS/compass is pointed in the same direction as the flight controller.
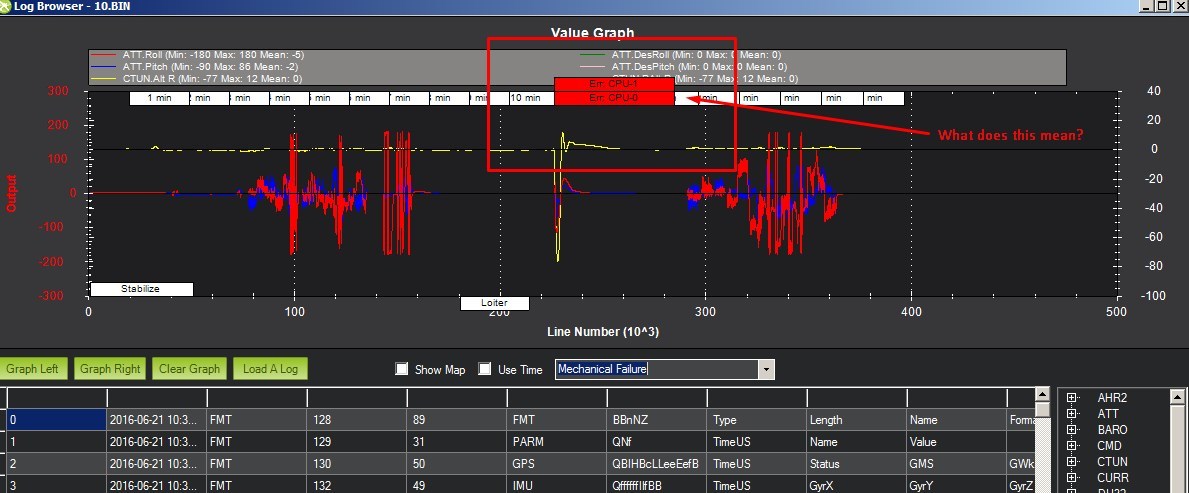
The CPU errors in log 10.bin come from the CPU watch dog. This is triggered if the main loop becomes stalled for 2 seconds. So in this log it appears the CPU froze up for about 40seconds which is quite unusual and I can’t explain what caused it. As far as I can tell the vehicle was not flying at the time though. Besides this one event the performance (shown in the “PM” log message) looks normal with only a small number of loop (normally less than 20) running longer than the ideal 2.5ms. So I guess this even is not related to the vehicle flying erratically.
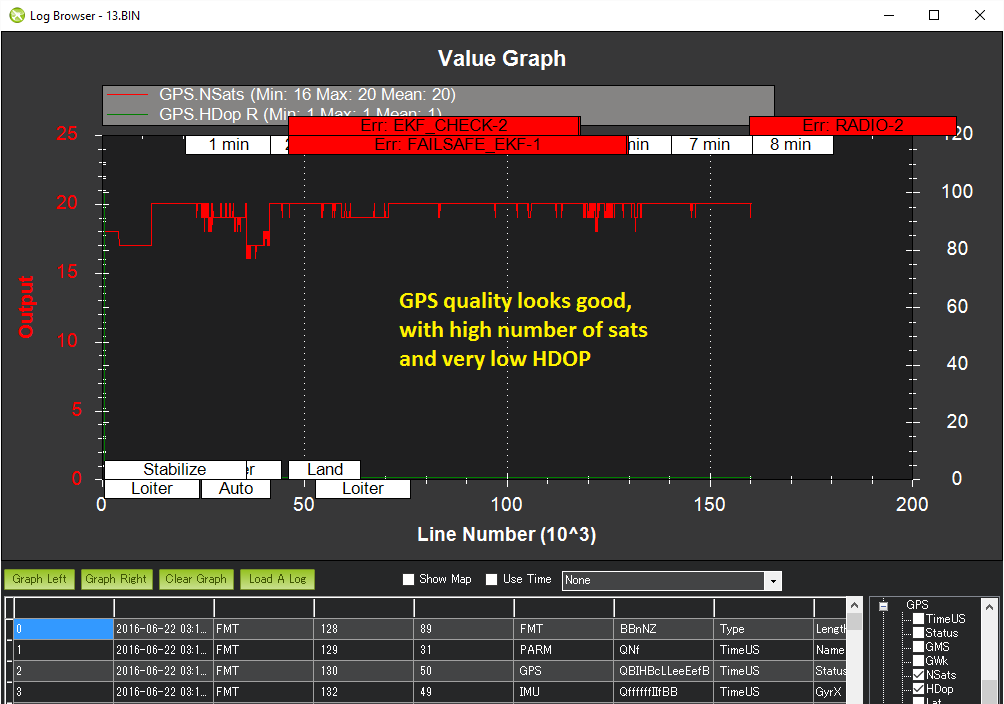
The EKF_CHECK-2 and FAILSAFE_EKF error messages are more likely related to the problems you’re seeing. What’s happened in this even is the EKF (the position and attitude estimation system) is having a hard time putting all the sensor data together into a consistent estimate. It looks to me like it’s the compass that’s the issue.
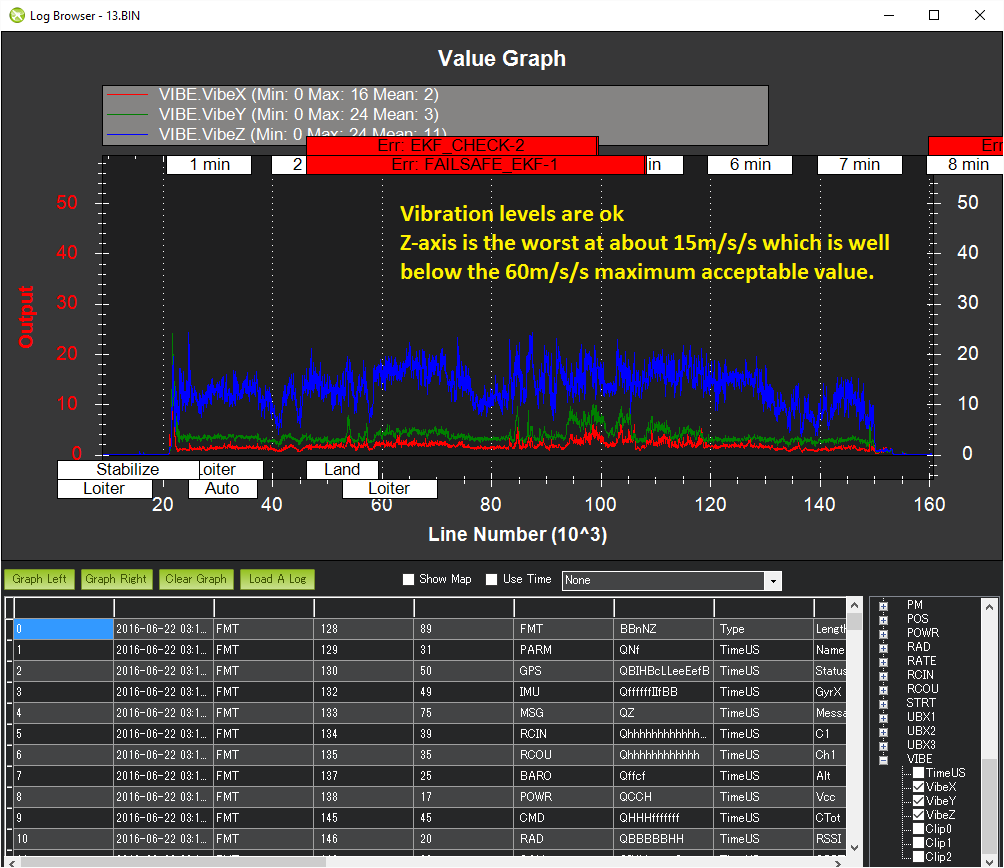
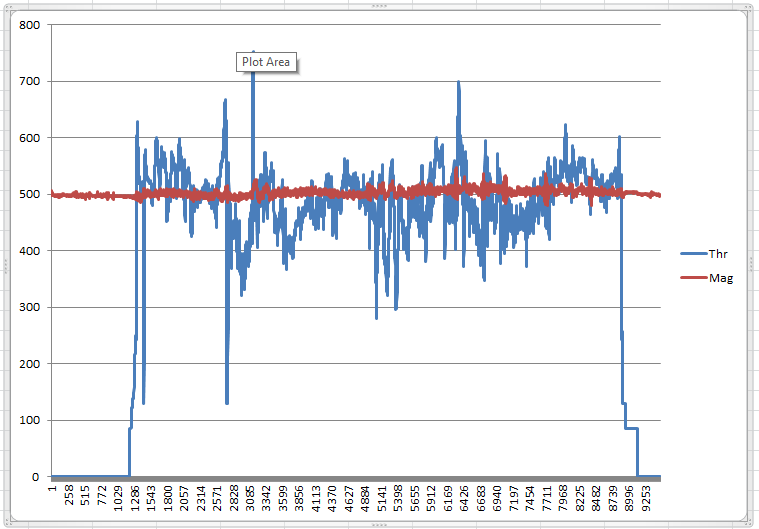
The GPS quality is fine, and vibration levels are reasonable. Even the compass vs throttle looks ok meaning that it’s likely not that the compass is too close to power wires. My bet is that the compass orientation parameter is the issue. Maybe try making that zero and see if it solves the problem.