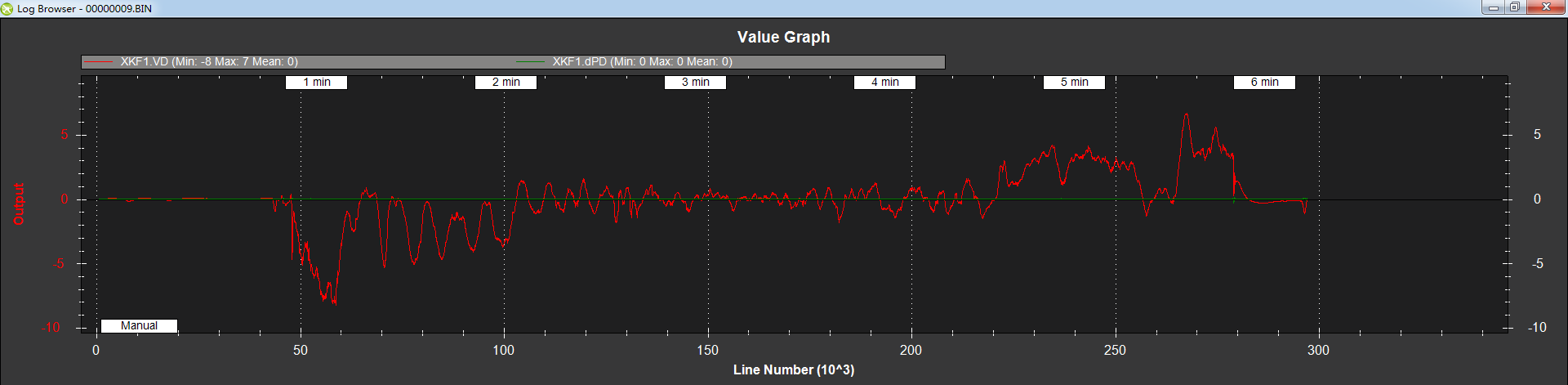
Suddenly I found a problem (see figure above) from my log data where "XKF1.VD (velocity Down )" is very different from "XKF1.dPD(first derivative of down position )", although I think they should be almost same. According to figure above, the"XKF1.VD " truely reflected the vertical movement of my plane,however,the "XKF1.dPD" did not. Why?
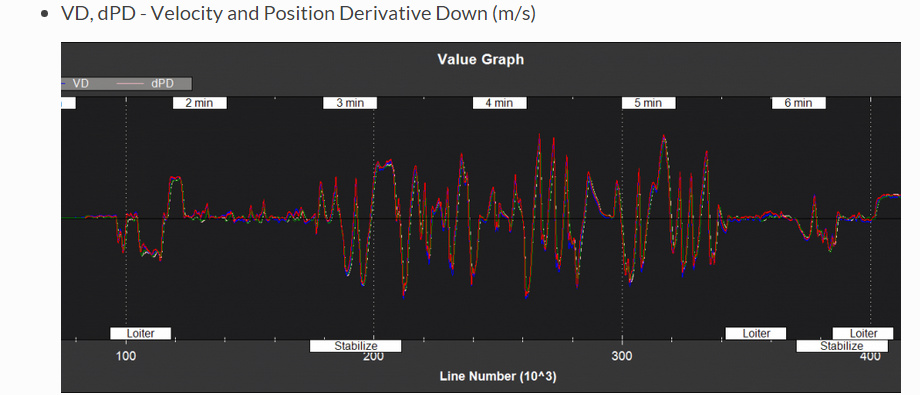
I reference the Ardupilot wiki where “XKF1.VD” is related to “XKF1.dPD”(see http://ardupilot.org/dev/docs/ekf2-estimation-system.html or figure down)
EK3 is used on my plane.Can someone tell me why is this?