Hello,
i used GPS yaw sensor with arducopter, and had issue on ek3 yaw initialization. Usually YAW value can aligned with gps yaw sensor quickly while power on, but sometimes NOT, it may become slow, or yaw value continual increase.
if the situation appered, i need to move the copter and force ek3 algorithm initial again.
any idea to improve it?
thanks.
please watch the video:

0:11 reboot pixhawk
0:48 mavlink connected
0:49 get “error conpass variance”
2:18 yaw value aligned with gps yaw sensor
2:24 ARMED and flight on loiter mode
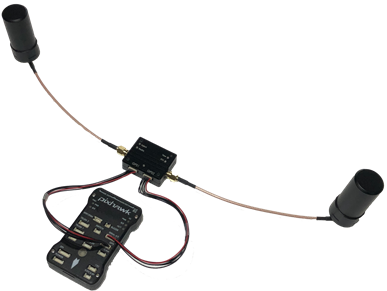
here are my setup:
AHRS_EKF_TYPE = 3
EK2_ENABLE = 0
EK3_ENABLE = 1
EK3_MAG_CAL = 5
COMPASS_ENABLE = 0