I want an EDF to climb vertically. There is no prop wash over control surfaces but there is plenty of airspeed (high thrust-to-weight ratio). My idea is that with enough airspeed, QSTABLIZE should keep the plane upright. I try this in RealFlight where I can make arbitrarily powerful fans.
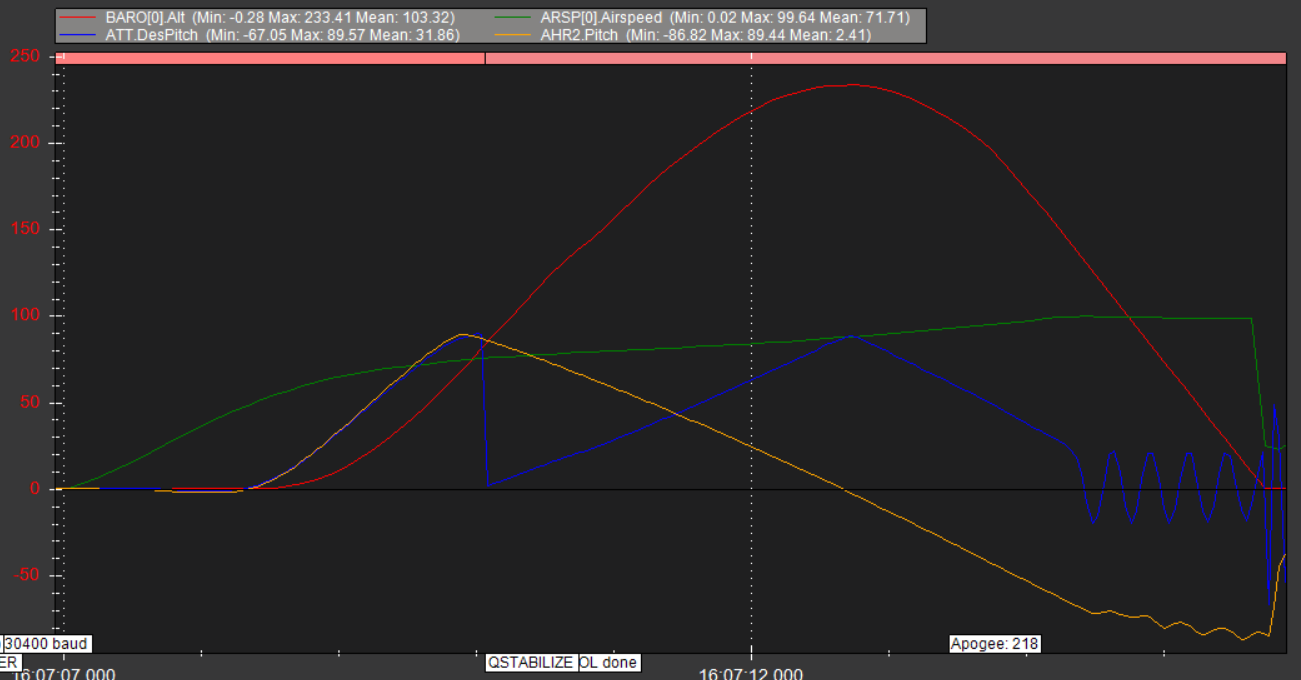
When I switch into QSTABILIZE, the plane initially pitches up, but then drops the nose. A couple of things to note:
- There is plenty of airspeed throughout the flight. Airspeed drops to zero only at the moment of impact.
- Airplane is tuned well for forward flight.
- Achieved pitch tracks desired pitch very closely. Desired pitch is confusing to me.
- Thrust is not part of what I’m trying to tune. Throttle input remains at 0. I control motor RPM with a passthrough channel.
- I use Disk Theory gain scaling as it takes airspeed into account.
Log here: https://github.com/arikrupnik/ardupilot-config/blob/master/logs/FIXED_WING/13/2023-04-24%2016-07-05.bin?raw=true
RealFlight model is here: https://github.com/arikrupnik/ardupilot-config/blob/master/aircraft/habu-sim/E-flite%20Habu%20STS%2070mm%20EDF%20(rocket)_AV.RFX