Flight testing of PR https://github.com/ArduPilot/ardupilot/pull/11763
This PR adds 2 new parameters, Q_FWD_THR_CH and Q_FWD_THR_MAX for quadplanes to manually control forward throttle in VTOL modes. This is useful to counter headwinds without pitching downward with the associated loss of lift from the wings.
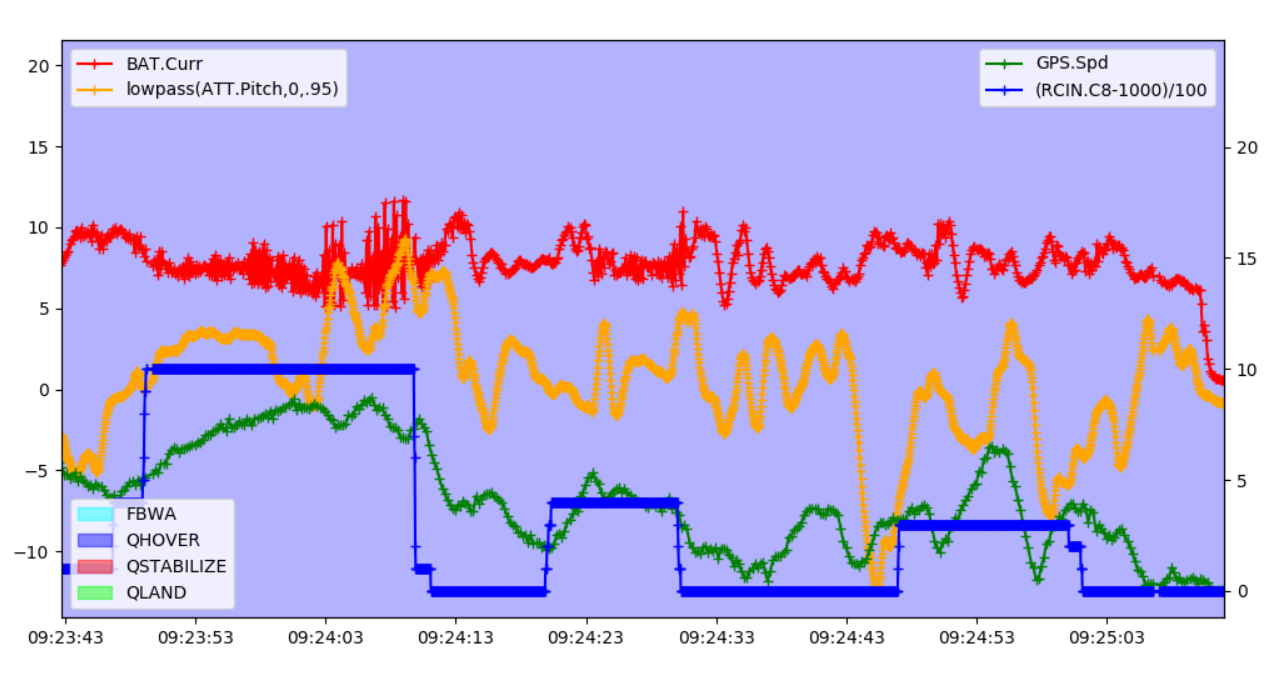
This is a plot of groundspeed, battery current and pitch against the RC input with Q_FWD_THR_MAX =0.25