Motor sudden stopped during normal flight. Below I am attaching the log file of this test flight. Please help me to get out of this.
https://drive.google.com/file/d/1PRZ-afr6uGVU_H98S5TSeaIRKQBjC8dH/view?usp=sharing
Motor sudden stopped during normal flight. Below I am attaching the log file of this test flight. Please help me to get out of this.
https://drive.google.com/file/d/1PRZ-afr6uGVU_H98S5TSeaIRKQBjC8dH/view?usp=sharing
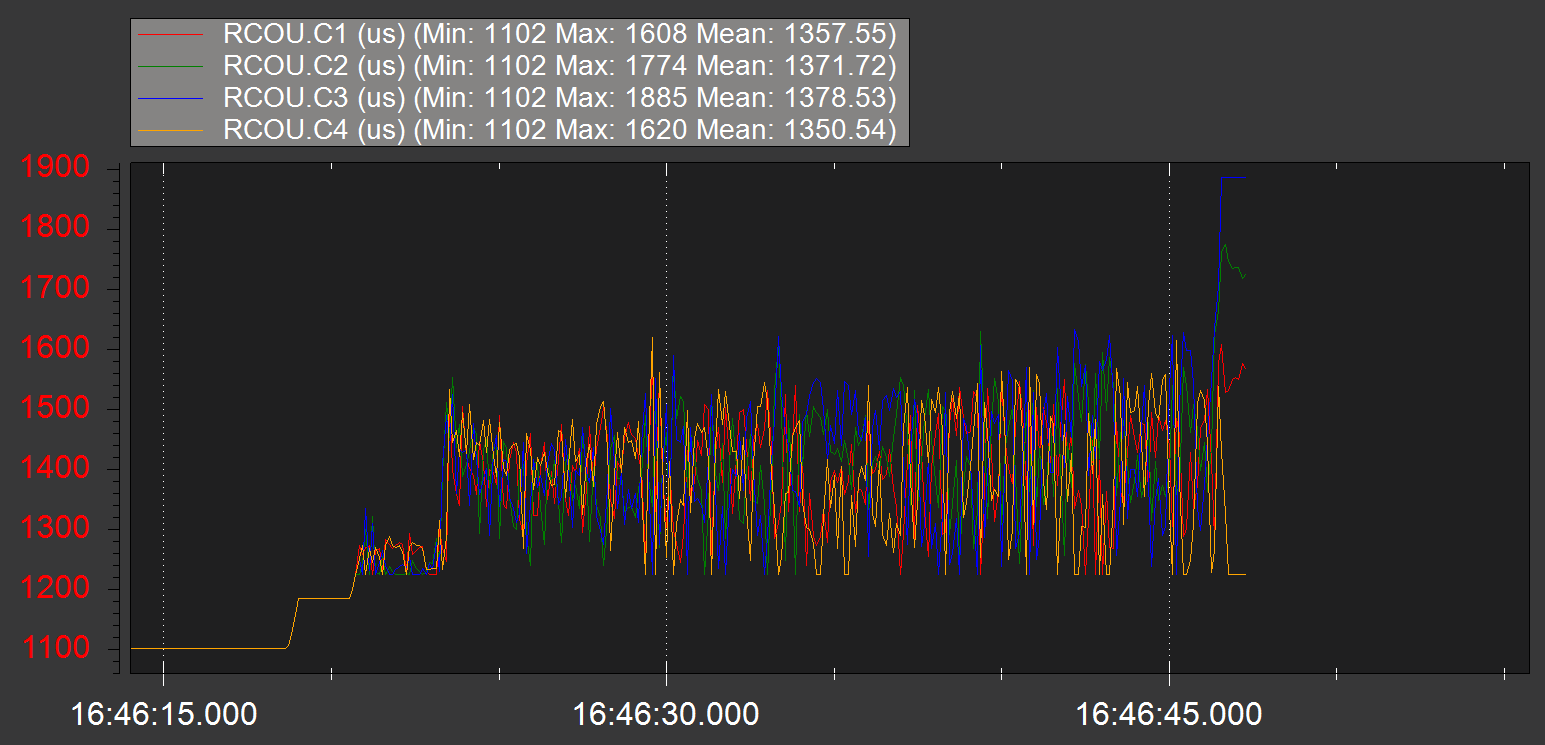
In the last flight Motor 3 has some complete failure (it’s commanded to full power) and output to Motor 4 is reduced to try and compensate. Either motor or ESC died for some reason.
Motor 3 is frequently going to minimum output too and the quad is struggling to maintain stability and altitude (and not do a fly-away) .
You’ve got MOT_SPIN_MIN at 0.15 yet MOT_THST_HOVER is 0.125, so you’ve got two options there or maybe a combination of these:
MOT_THST_HOVER is automatically calculated so you dont need to change it.
Thank You.
1st of all it has happened many times with me. I’m using a 4 in 1 esc.
Same thing happened with orange cube also with black cube .
Even During auto tune. When roll was over then sudden motors stopped and Drone crashed.
I changed esc (4 in 1) and motors also .
Same thing happened again. 
Judging by existing parameters I’m assuming you’ve got something like 10 inch props.
Your PIDs seem wrong, D terms are way lower than expected. This could potentially affect the ESC reliability - although you usually expect high D terms to cause motor hearing and ESC failure.
These will be safer options to start with:
ATC_ACCEL_R_MAX,100000
ATC_ACCEL_P_MAX,100000
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625
and see if you can get stable flight with INS_GYRO_FILTER,40 <- this should be the goal.
Also it will be beneficial to set up the harmonic notch filter, then run Autotune.
Let us know when you’ve got it prepared for flight then we can step through the harmonic notch filter settings.
HNOTCH phase 1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
HNOTCH phase 2
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,1 (unless you can set up ESC telemetry)
INS_HNTCH_REF,hover_thrust
INS_HNTCH_FREQ,peak freq from FFT
INS_HNTCH_BW,peak_freq / 2
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
HNOTCH phase 3
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0