Thanks for the reply. But I’m not sure what you mean by “quad + tailsitter”?
Thanks…
Thanks for the reply. But I’m not sure what you mean by “quad + tailsitter”?
Thanks…
This post shows a quad tailsitter: Dual-motor tailsitters
It is a tailsitter with a quadcopter motor arrangement, as opposed to a “quadplane” which is an airplane plus a set of quadcopter motors. The generic term is “copter tailsitter”; theoretically we support tailsitters with any existing multicopter motor layout, such as hex, octo etc.
If you search this thread for “quad tailsitter” you’ll get many hits.
Thanks very much Mark…I can see that even though I’ve been working with APM/Pixhawk for several years, there are entire frame classes I know nothing about!
Fascinating…thanks.
@kd0aij thanks for the parameters.
Another subject, since @iampete posted the amazon delivery drone video I am thinking to make a biplane flying wing quad tailsitter. One motor on each wing would make a quad X configuration. For that specific configuration it would make sense to have yaw controlled both by control surfaces and differential torque. This design would give amazing wind resistance and safer landing. Do you think you can modify the code accordingly ?
I think that should be fairly easy to do. Will take a look and let you know.
@losawing @iampete @tridge
The quad X configuration is already supported without differential torque for yaw.
I could add new frame types for plus and X with diff. torque, or change the existing X frame to provide differential torque.
Do you think diff. torque might also be useful for the plus configuration? I guess the only downside would be uncompensated torque in FW mode with motors 3 & 4 shut down, but that’s probably OK for many use cases.
I think it is worth having the option, just need a param to use the original motor mixer or the new one without yaw.
@iampete I think it makes more sense to define a new frame type for the existing plus configuration, since it doesn’t match the motor rotation directions specified for “Quad +” in the copter documentation here: http://ardupilot.org/copter/docs/connect-escs-and-motors.html#connect-escs-and-motors3
There is a precedent with “Quad H” which differs from “Quad X” only in that respect.
(not to mention MOTOR_FRAME_TYPE_BF_X, MOTOR_FRAME_TYPE_DJI_X and MOTOR_FRAME_TYPE_CW_X)
How about using the existing enum value MOTOR_FRAME_TYPE_X to specify differential torque for yaw and define new enum values MOTOR_FRAME_TYPE_NYT_X and MOTOR_FRAME_TYPE_NYT_PLUS (NYT for “no yaw torque”)
I was just being lazy, if we add a pram for it we get all the existing frame types for free. Our existing frame type does not actually require any particular rotations, you could do it however you like, although one each way on the wing is better for forward flight.
So your proposition is to make 2 frame for the quad + and one for the quad X with mandatory motor direction rotation. That’s sound good for me. But no hurry to make the code implementation, I have to go to the DIY shop and buy some foam to begin the construction. The most difficult decision will be to choose which plane will be disassembled to get back the electronic.
Do you think it would be a good idea to create a new thread in the VTOL plane category to share this specific development.
OK, I’ll add one or two new frames to test the yaw option and get more feedback.
I’d been thinking we should start a “copter tailsitters” thread for a while, especially since they aren’t dual-motor. I’ll create a new topic when the new frame is ready to test.
2 flights with my test wing and FLT default parameters , q_hover, q_acro and fbwa modes. Everything is working, no angle problem, high accelerations for all 3 axis, smooth and stable flight, no oscillations, transitions perfect.
Since my last post I’ve had a few flights and no problems with transitions to hover. I went about it very unscientifically and changed a bunch of things at once:
Now I’m trying to get RTL working right. I want it to fly towards home, transition 15 metres away (that’s how far it usually travels forward during transition) and then land. I set Q_RTL_ALT to 10, RTL_AUTOLAND to 1, RTL_RADIUS to 15, but it did the transition 60 metres away from home. It also climbed altitude (35m to 42m) during the flight part before transition, when I was expecting it to aim for 10 metres altitude. Anyone know what I need to look at?
I tried only one time an auto mission with take off and landing. the video is post 1520. If my memory is correct I used VTOL_takeoff and VTOL_land commands according to
http://ardupilot.org/plane/docs/quadplane-auto-mode.html
I had no problem with distance or altitude gain but the stability during the descent was not satisfactory.
Has anyone tried to ArduPilot-ize a E-flite X-Vert? There seems to be a good amount of work with its tilt rotor brothers – the Convergence and Mini Convergence
Hello guys,
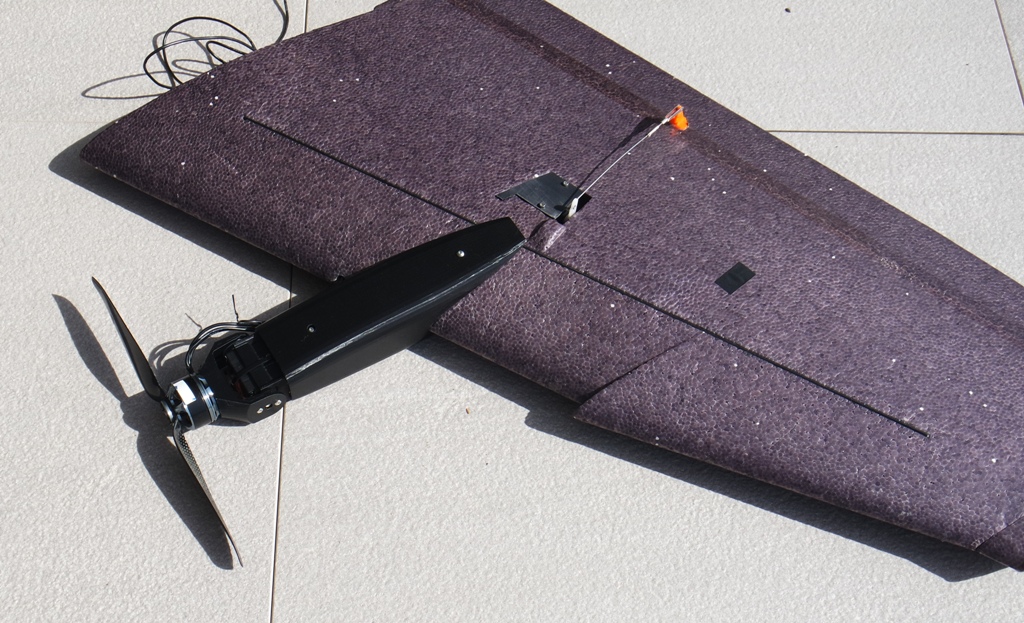
After a long period of abstinence, I come back with my modified Tailsitter as a VTOL Tri Tilt.
I have tuned the wing in the rack and the params are nearly perfect for hovering.
Here the maiden flight in order to test QHover.
Thanks to the devs for the fantastic firmware.
Now with some perfect transitions.
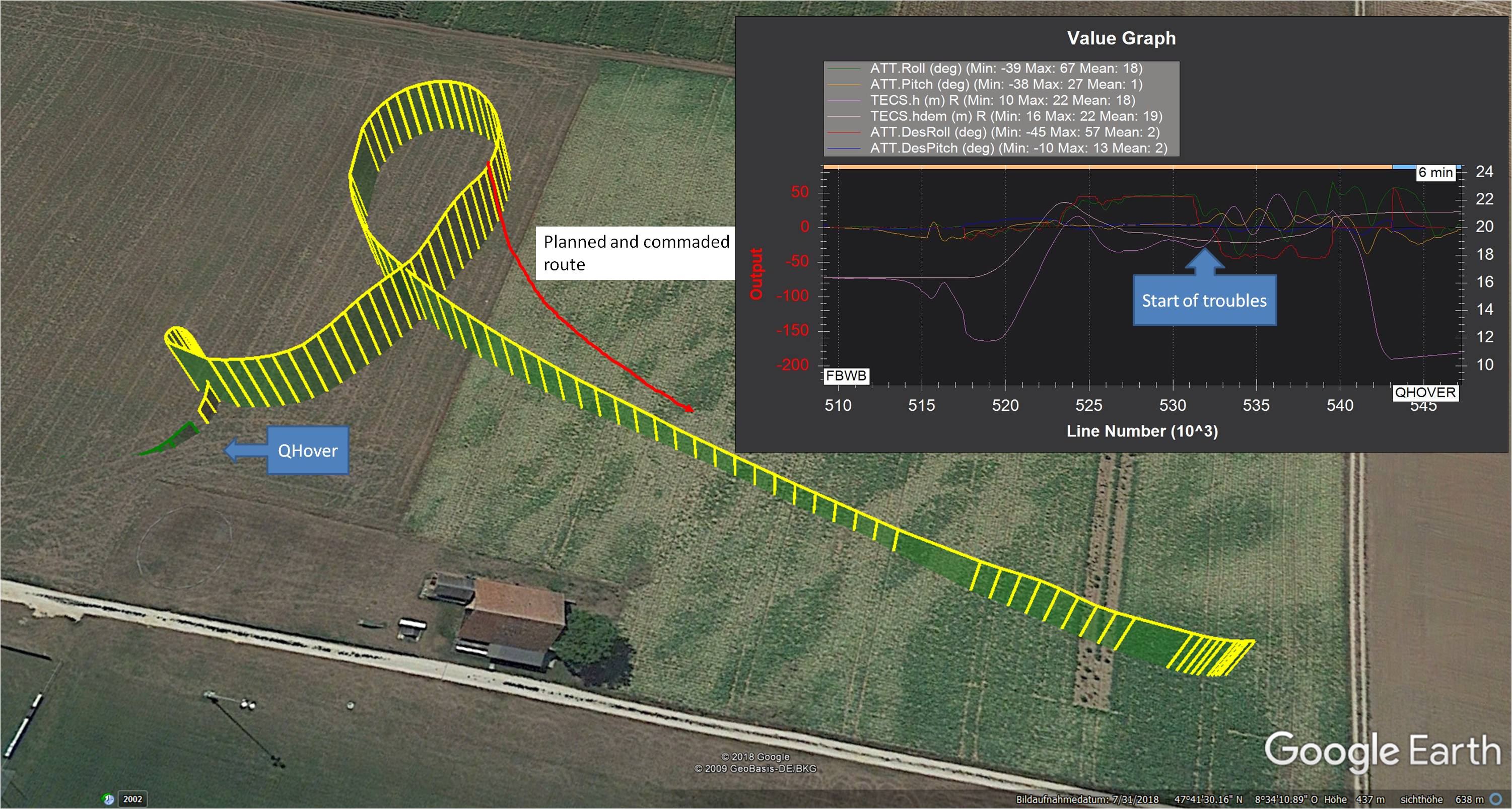
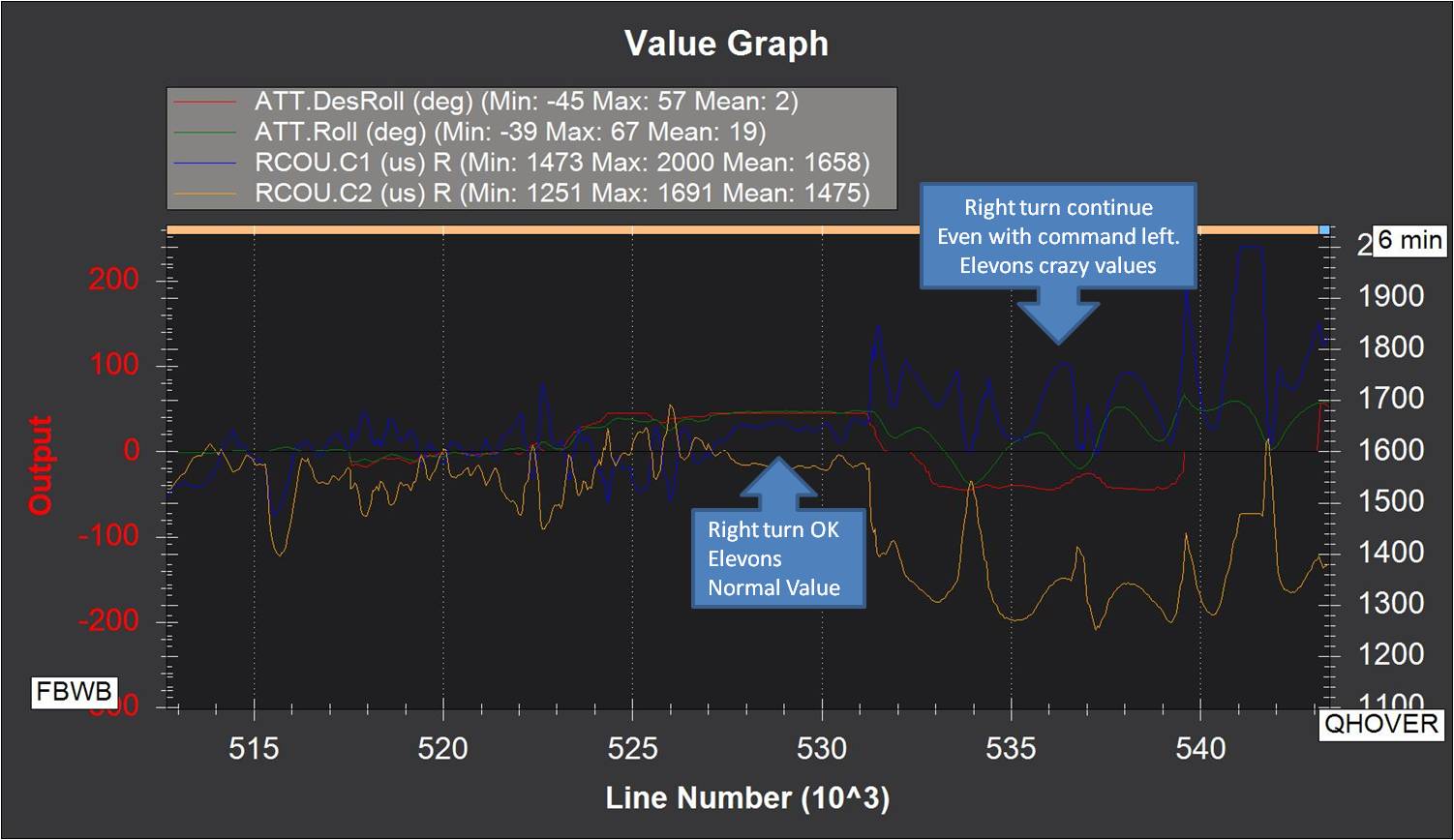
But with a great FBWB issue. After a right half turn it did no more level. Instead continued and
rolled up to 60°. There is a gap between DesRoll and Roll in the log.

Thanks, Otto, for this funny video. I would bet the first crash is simply a stall. Your wing was flying slowly and a stall is something not easy to recover from when flying an assisted mode. Do you have Q_assist_speed or q_assist_angle non zero ?
I can not read your log, APM planner fails to open it, too big for sure.
Thanks for the feedback. My MissionPlanner and APM can read the log.
Will try if I can shorten it because only 7 min are of interrest.
Q_sssist_speed is 0, Q _assist_angle 30.
A the point where it did not react anymore to level or to turn left the speed was about 15 m/s.
Here two pics to show the details