I have found that the z controller is more predictable with accz_I =.05 and accz_P=.2, and reduced Imax, but I haven’t yet tried it off the tether. Definitely a problem with the integrator overshooting wildly in both directions, so I don’t trust it anywhere near the ground yet. Very difficult to troubleshoot since this problem doesn’t show up in SITL at all, and is very likely to cause a crash with the real model.
very nice. D term is 0 by default. A little D may help to limit speed variation.
I have in project a 80cm plank wing with a jlw 65 airfoil and 4x1806 2300kv motor. The wing is already cut. It should be fast too. Let"s see how long it will take to go from hover to 100km/h.
Wow. Seems very smooth and powerful. In the absence of a 3D printer,
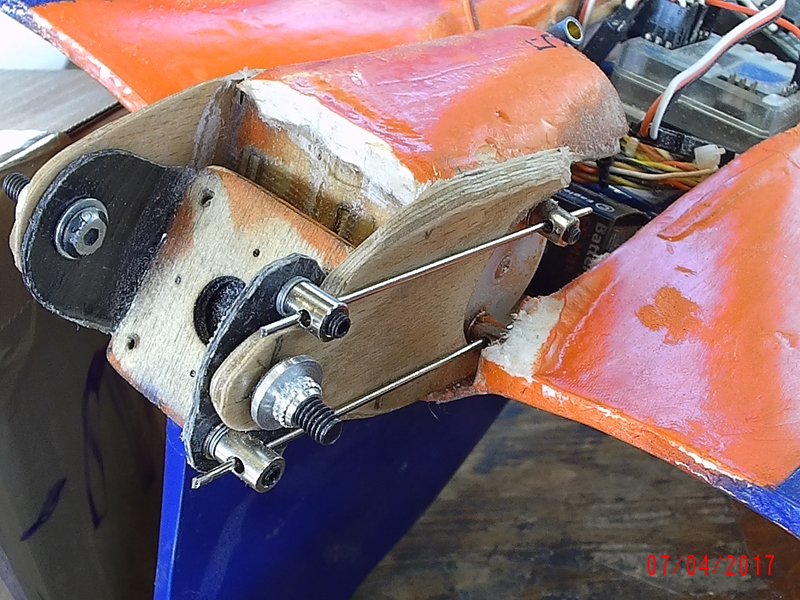
I solved the balance and servo shock loading this way:
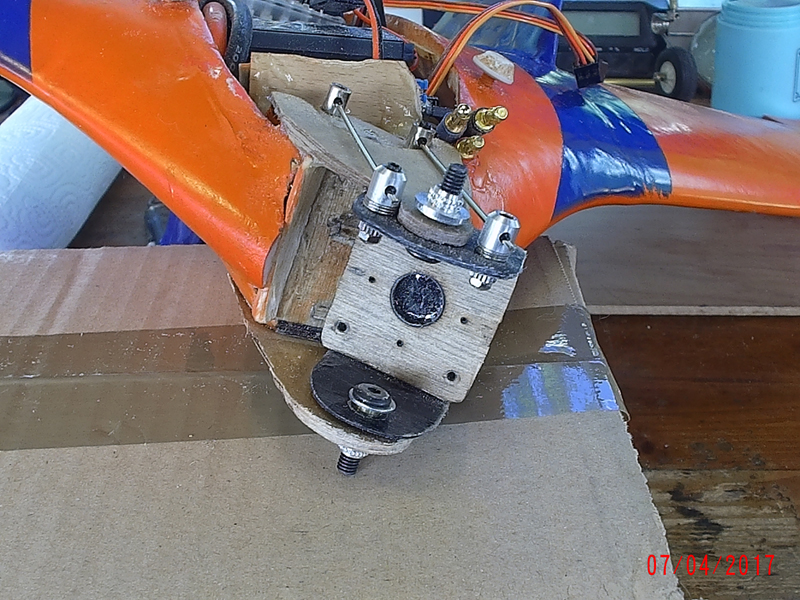
Sorry about oversharpened image Crappy camera.
Carbon fiber motor carrier, ply spacer to get balance point right.
Of course, these things are supposed to land on their tail—right?

HI James, thanks for the reply. I’ve committed to the 2 motor on a plank wing design. Here is where I am:
- I’ve cut the wing (yes, a air foil with a reflex) 1.8mx440mm. Coated with 2 layers of 100g/m2 wide tow carbon, a square carbon duct for wiring and vacuum bagged with a white spray job(the carbon black gets very hot in the sun). Came out to around 1.6kg - big bugger - almost 80dm2. The paint is heavy:)
- Identified 2x60 size motors, 400kv on a six cell with 16x10 speed electric props, bought the motors, ESC’s and servos(Ouch 16kg 18ms Savox should be able to turn the control surfaces - expensive stuff)
- My pixhawk, GPS and airspeed sensor is on its way.
For now I’m shelving this big fella and doing the same project on a much smaller scale - to get my head around the new principles - as suggested by a much wiser member. I have a smaller plank wing - around 1mx270mm. It has a NH41 air foil though…I’ll post some pics when I have finished the hardware.
BTW, your design looks pretty impressive - The guys from Lukas studios might just borrow the look:)
1 Like
Thanks very much Antonie.
There are two phases of creating a flyable package for a new aircraft type- the airframe construction phase and the software phase. All the great software efforts in the world are stillborn without aircraft for testing. I’m sure Tridge is well aware of this reality- he has worked hard to support those who could support his great coding with guinea pigs to test on.
Do guinea pigs fly? God, we hope so.
The aircraft shown before is one of three- a transplant from a more mature effort from the OAVTOL thread, over in RCGroups, and therefore rather larger and costlier than I’d prefer for this…
Problem there was that, while the software idea was great (any non-coder could do their own mixers with ease, for example), the hardware (KK2.1.5 board) was very limited, which in turn limited the software. So I brought my toys here, and am learning ArduPlane as the second phase instead of the first.
Please post photos of your construction process. It’s an essential part of the development thread, and might help others to kinda remember that, as well as learn something.
I fully expect to lose the big one. I’ll get depressed for a few days. But I’ll just dig out the other two, and try again. Or build again.
I’ll get depressed for a few days. But I’ll just dig out the other two, and try again. Or build again.
Never gamble in a game you can’t afford to lose.
Hi all,
Have got round to doing a vid of my TVBS, a FT bronco after I crashed the arrow, the vid is mostly me practicing transitions from Qstabalise to FBWA, after some practice I manged to get much more level back transitions. I have angle max at 100 and transition angle at 0. Crashed when practicing flying inverted with the aim of trying a Qstabalise to inverted FBWA transition.
Nice flying! Two questions:
By angle max do you mean Q_ANGLE_MAX and is it 1 degree or 100 degrees?
and by transition angle do you mean Q_TAILSIT_ANGLE=0 ?
Make that 3 or 4 questions 
How do you set up for inverted flight in FBWA?
Q_ANGLE_MAX at 100 degrees, this is a value of 10000, allowing you to pitch right over to a forward flight attitude in stabilize.
yeah, Q_TAILSIT_ANGLE of zero, this allows you to transition to hover mode in level flight, other wise you have to first fly up to that angle in forward flight, this results in always gaining loads of altitude when back transitioning.
You can set inverted flight on a transmitter switch, works in all forward flight modes i think, although i think you need to go faster than i was there, i didn’t realize how much it slowed down inverted until i watched it back
Thanks for the info. The valid range of the Euler pitch angle is +/-90 degrees, so it might be safer to use a value <= 9000 for angle_max. That Bronco would make a great small-park flyer, since you could land it just about anywhere.
like the design idea,… gets the yaw/pitch out were it works best, (hair cut?)
stable and smooth flight, congratulation.
ptch2srv_imax limit the throw of the pitch servo. To flight inverted there is probably not enough throw.
But be carrefull, I hardly crashed a wing while trying high values of ptch2srv_I and rll2srv_i
Hello,
I’m testing my tili motor tailsitter model now.
Have successfully tested it against QStabilize, QHover, QLoiter and QLand modes.
However, every time I try to make a transition to a horizontal flight, in my case FBWA, or perform the mission like VTOL_TAKEOFF the plane almost immediately loses control.
Just few times I was able to save it from crashing by sending QLand high enough above the ground.
logs are here: (sorry .bin file was lost)
My configuration:
- ArkBird VTOL mo from banggood
- 3S 2500mAh battery
- Turnigy PARK 480 1320kv motors
- Pixhawk 2 flight controller
- SW: ArduPlane V3.8.5. (7dc5e040)
Pls. help me to analyze this behavior.
1 Like
It seems to me the wing want to fly trailing edge first.
Where is the CG ?
Hello,
the center was about 1-2cm to the front from manufacturer recommendation.
It is verry unstable in QStbilize oder QHover.
I needed more than 100 test flights to finde the correct parameters
Your wing is similar to mine.
So compare my parameters with yours to finde whats wrong.
Vor wechsel auf 3 8 3 beta3.param (16.1 KB)
And this was the flight with this params.
Otto
So OK for the CG. I suggest to switch to manual and make a hand launch to test.
Because your wing fly in VTOL mode I dont think something is reversed. But just in case, hold the aircraft in your hands and switch to FBWA mode, then pitch and tilt the plane to confirm that the control surfaces move the correct way to return it to level flight. Sorry for this suggestion if you already made this test.
I checked your fixed wing PID. They seems to be almost default but strong oscillations we can see on your log and on the video may suggest they are too high. You can test rll2srv_p and ptch2srv_p= 0.3 instead of 0.6.
You have set Q_tailsit_vf = 0.4. This is a high value and I suggest to set it to 0. Vectored thrust is a nice feature but it is not needed for horizontal flight, you will raise it again in a second step.
Yaw control is better now for the little “Dart” quad-tailsitter. Larger elevons with more throw and disabled the code which abandoned yaw control when errors are large. Note that there were no large yaw errors induced during this test though.
I like the idea of this small and fast quad-dart. I hope to see transition soon and speed tests.
Hi there I am new in this forum and I have bulit a Tailsitter Caipirinha2 with non vectored dual motor setup.
I am playing around with arduplane,copter,and traditional heli. the last 6 years.
I read nearly all of this discussion here an tested a lot (crashed about 12 times) -
May elevons are about 1/3 of the wing as recommended. Now I exteded the servo throw.
The Plane flies acceptable in the ‘wing’ modus FBWA - but in qstabelize and qhoverI have the following problem:
The hovering is quite stable until a light wind blows or I lean more than 30 degrees to the back or the front.
If this starts …the motors are accelerating- and the plane starts to climb and wants to fly !!! I once hat that issue - switched to fbwa and then flew a round …but It should hover until I flick the switch to fbwa not before.
Now I examined the logfile and the throw of the elevons when starting to lean in either direction are max 45 degrees - although the physically move could be 60 degrees (for example in acro or man mode).
My question now is: which parameter determins the max elevon lean angle ? I went through the Q_ and Q-A parameters many times but could not find a solution.
Maybe one could help me 
to My person : I am from Germany, just turned 50, and build about 8 drones, 2 helicopters, 2 planes and now the tailsitter  came from the very beginning of apm 2.5 now to pixhawk mini micro and pixracer(like the wlan configuration via ipad )
came from the very beginning of apm 2.5 now to pixhawk mini micro and pixracer(like the wlan configuration via ipad )
Thanx for your help in advance ,
acdc1
Hello,
thank you for your fast answer.
After the test on last Friday we have to change the motors, props and the battery type, thus to correct the CG the battery was moved back.
About surface test:
We did that many times, it looks like on this video. However, the surface move is opposite to what is mentioned here in Servo Setup & Reversal section
Yesterday morning we have successful loiter test:
loiter test
logs+params
Same afternoon we tried Auto mode mission and crashed. The mission was very simple:
VTOL_TAKEOFF (height 30m) – Waipoint (about 100m away) – VTOL_LAND
Auto mode test
logs+params