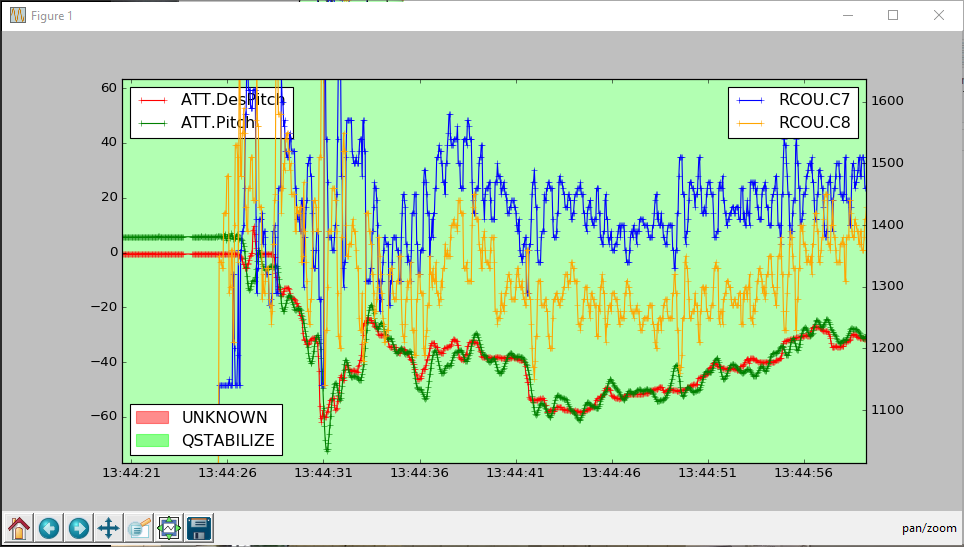
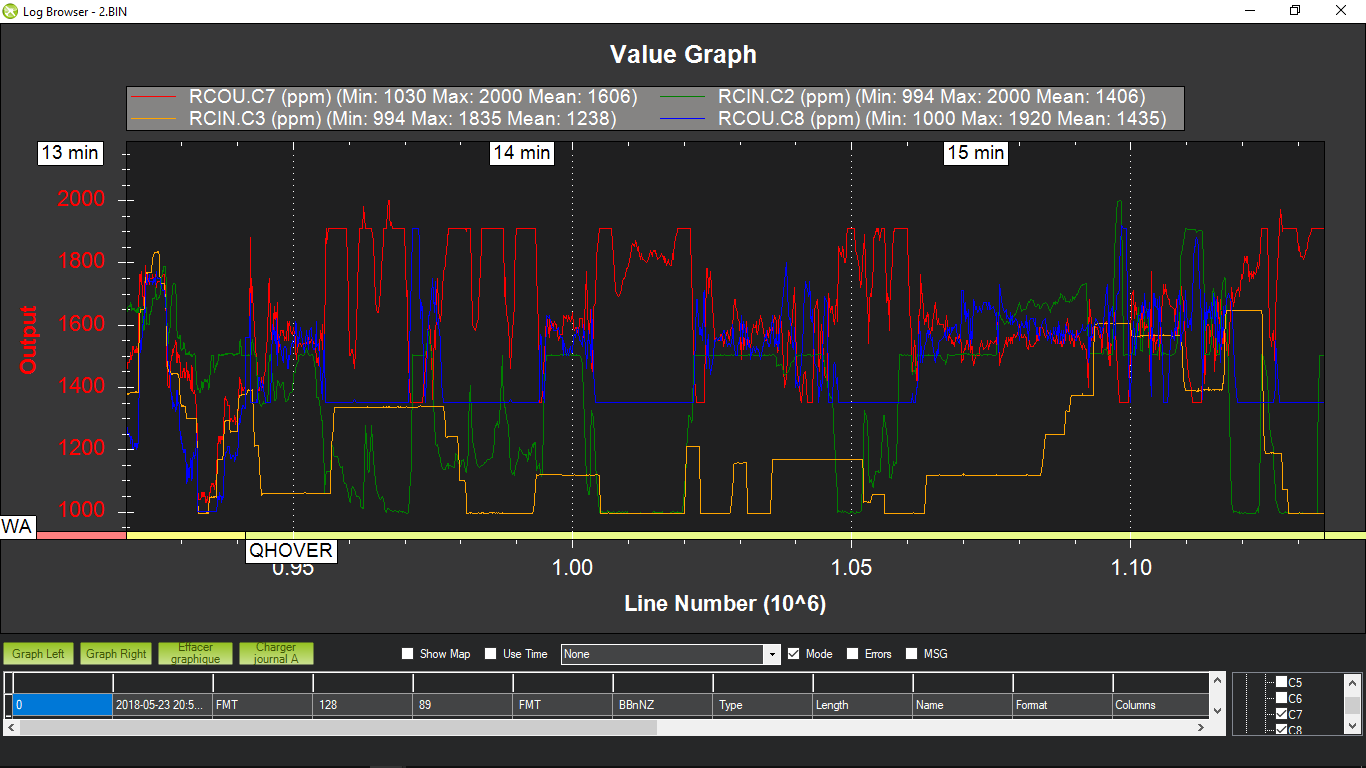
As you can see, the top motor (C7) and the bottom motor (C8) were mostly below 50%
(SERVO*_MAX/MIN are 1900/1100) and the top motor is running faster than bottom.
RCout8 is top motor and RCout7 is bottom
RCin C2 is elevator stick and RCinC3 throttle stick.
RCin C2 decrease mean stick forward and full forward correspond to 50 to 60° lean angle.
You can see that bottom motor increase when elevator is pushed forward even at low throttle input. A better analysis would be to plot on the same graph directly the lean angle but I dont know how to do.
This why I have double checked the wiring and the way top and bottom behave when the wing is tilted. A supposition is the gain attenuation is not done on top and bottom motor but done on input from elevator so the competition between return to level and input is won by return to level. I dont know if I am clear and maybe I am wrong. But what I can say is that the attitude of the wing was way better with less gain attenuation. Please, let me know your conclusion.
MAVExplorer.py can plot using two different Y axes, but it doesn’t like your logfile as I mentioned before. Also, I must have an old version of MP, because, although it can display your log, it thinks you are in loiter and throw modes instead of qhover and fbwa.
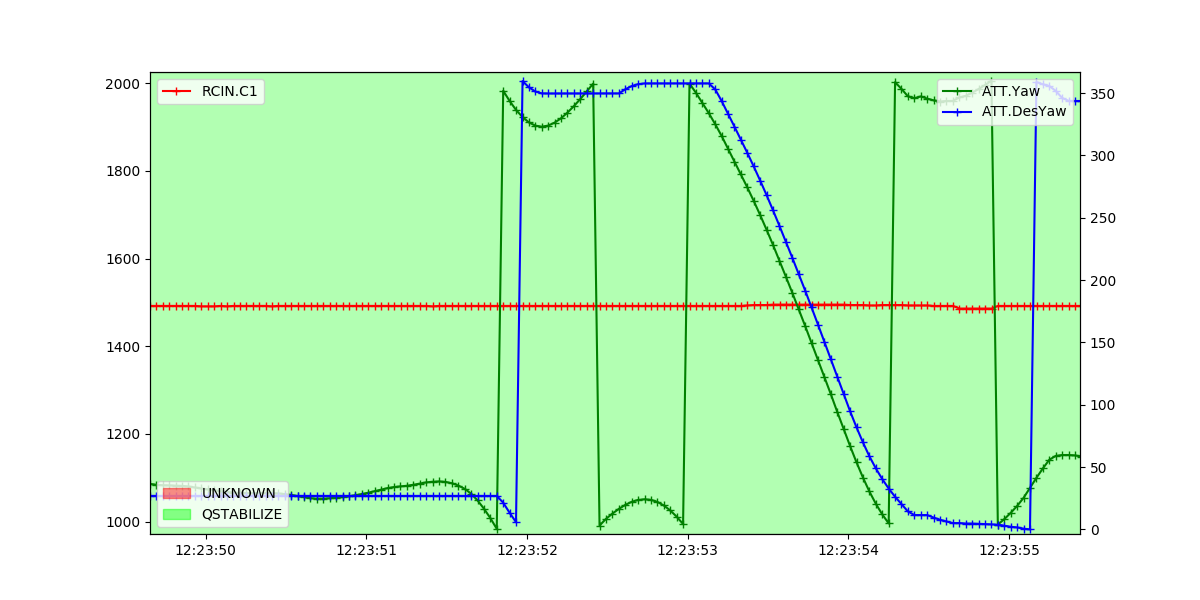
Here’s a plot of the uncommanded yaw (body-frame roll) in qstabilize mode that I observed recently. It shows rudder input against the left axis, and yaw against the right axis:
note that rudder input is neutral during the 360 degree yaw excursion, but the setpoint (DesYaw) is moving for no apparent reason, and that DesYaw is lagging Yaw, implying that the setpoint is sliding to match actual yaw. That’s a big hint that the yaw controller has given up, but I haven’t found any code that does that, although this behavior is familiar for some reason…
Also, when you command down elevator in VTOL mode, that changes the setpoint for pitch angle. In other words, if you do a handheld test in QSTABILIZE mode, with full down elevator, the top and bottom motors should run at equal speeds when you pitch the nose downward to Q_ANGLE_MAX; the attitude controller should use top/bot thrust to maintain the commanded attitude. If not, something is backwards.
@losawing I think I fixed the top/bot motor spinning when disarmed in FBW mode. I renamed my local branch to quadTailsitter, rebased and created a new PR: https://github.com/ArduPilot/ardupilot/pull/8498
but haven’t done any testing yet. I’ll work on adding a new parameter next.
thanks, I will try mavexplorer.
strange yaw behavior, there is something ordering a roll action of the plane, could it be the compass which get lost ? I never had a close look at this particular phenomena but I will take care.
your last remark about setpoint is very interesting. You answer exactly to my question but It seems to me that at Q_angle max top and bottom motors do not run at equal speed. But this need to be confirmed.
For the moment, I removed and opened all the electronic to get it dried. I get used to, it is the 4th time.
I get to fly off of (fresh) water at my RC club’s float flys several times each summer, and have only lost 1 ESC and a servo or two due to takeoff and landing mishaps. But I’m guessing that’s saltwater you landed in…
This gives me the idea to make an amphibious tailsitter; same idea as my AquaQuad with the electronics in a watertight fuselage. Definitely need the motor tilt for that, though; the Convergence would be perfect.
Electronic dried so the wing is back to the air. I went a little deeper into tuning and I begin to get used how it fly. I can say the quad configuration is amazing in some aspect. The descent speed can be very high, maybe 2 or 3 time higher. Also the recovery ability is incredible, for some reason I had a throttle cut of less than 1s while the wing was hanged to the prop but the wing was able to recover from a nose facing ground situation at 5 m altitude !! The last but not the least, the flight in fbwa is very smooth and the ability of flying slowly is improved. I will post a video. I hope you will make an other wing to test it by yourself because this is a nice result.
I confirm the fact that the bottom motor always spin faster than the top when flying fast in q_hover. This could be an configuration related problem as my wing tends to overshoot the maximum lean angle.
A last remark: I looked at parameters that goes with the bin file you posted. I found that q_a_rate_yaw_I is very low (0.1) and this can be the reason of the unexpected roll. My wings have this parameters set to 1 and I found it allows to withstand wind gusts much better. Also Q_m_spin_min (0.15) is too low for the back transition.
Hi, Im starting a tailsitter project and need some advice on some basic first step decisions. I intend to build a composite plank wing(based on the wingtra) with a fuse around the centre to house the battery, electronics and camera. I’ve looked and researched some designs for this and found some different approaches. I intend to have a wingspan of 1.8m and a chord or 440mm with a fuse width of around 250mm(battery width). Here are my questions:
What air foil would be optimal for a tailsitter. A flying wing air foil with a re-curve at the trailing edge or a conventional Clarke-Y or NH41 type?
The thrust of the motors - how much larger than the all up weight of the plane must the combined thrust of the motors be?
What ratio of the wing width is advised to be optimal for the control surfaces?
4.The CG seems to be elusive - looking at commercial designs, the CG is way to the front. You have the 2 motors out front and the battery, so it seems the CG calc is different - some guidance please.
Do I need 2 GPS’s for the system. One for vertical flight(mounted forward in the nose) and one for horizontal flight?
Hi AntonieK,
Having never designed a Vtol myself (but lots of 3D plane design experience). My 2 cents:
What air foil would be optimal for a tailsitter.
Optimal flying it as a flying-wing a flying-wing-airfoil (with reflex), but for the hovering stage i can imagine some undesired asymmetries and therefore a fully symmetric would be best for that part, it would need to fly (as a wing) with the control-surfaces slightly up (and preferably more at the tip of the wing).
I wouldn’t worry about the airfoil for anything other than optimizing the final design and the thickness needed for strength/stiffness. Like a NACA 0010 with it’s thickest point slightly more forward maybe.
how much larger than the all up weight of the plane must the combined thrust of the motors be?
1,5:1 can fly in a normal quad, more is better, this is not a normal quad, I would not try my first tailsitter with anything less than 2:1.
Also think about the size (diameter) of propeller. I’ve notices in indoor airplanes that is has a huge effect on control surface authority in hover. (even going from (two coaxial)13" propellers to (two coaxial) 15" propellers on a 60gram 32" plane). I hardly ever see large propellers on these wings, for forward flight you want a very different propeller, so i get that there is a compromise here. I would however start with getting the hover part right and later optimizing it. (or have a separate pusher in the back.)
What ratio of the wing width is advised to be optimal for the control surfaces? -
The CG seems to be elusive -
Here is where i think everybody comes to their own compromise.
The control surfaces have more authority far away from the CG. Yet at the same time the wing area you would want close to the cg (and the weight as well) Not spread out where it will slow down roll rate (all axis).
I would also start with the angle of the hinge perpendicular to the thrust (and flying direction) this also effects authority.
I don’t know why the CG would be different for a Vtol than a normal fixed wing, (although a flightcomputer can handle a cg more to the back than a human can) the height of the cg in hover stage should be close to fc and propellers and far away from aerodynamic control surfaces. if you need to move cg for the hovering stage i think a mistake was made in the design.
Do I need 2 GPS’s for the system
I like Helical antenna’s. They are not as sensitive (to interference and) orientation as a ceramic patch. And they are lightweight! That’s what i would use, (M1516HCT-P-SMA)
Hi Nando,
Thats great feedback.
Looking at the air foil, the plane will be in the horizontal flight position 95%. Would it not be prudent to have an air foil with lift in the horizontal flight rather than a symmetric foil? As you mentioned, just thick enough for structural rigidity and thin enough not to interfere too much with the flow over the wing.
The prop size having an effect on the authority of the control surface makes sense. I would think that the larger accelerated air flow will impact a larger area of the control surface.
I checked my design and thrust ideas on e-calc and found exactly the same conflict with the prop type and size. In the multi rotor calc I arrived at a 17"x5.5 prop on a 400kv motor running a 6S with hover at around 60% throttle. When I carried these over to the plane calc, the app complained about the prop pitch being too low and I eventually ended up at a 17x8 prop for the plane. I think I’ll start with the 17x5.5 to sort hovering, as you suggested, and then see how it performs in horizontal flight.
I’ll keep the CG at around 30% from the leading edge and see how it goes. The only down side with this is that I design and cut the fuse to the component dimensions, so if I move the components to move the CG, I have to redo the fuse cuts…
Great idea on the helical antenna.
Thanks again for your feedback.
In hover mode the CG has to be in the center in order the elevons are in neutral position.
And be avare that the elevons have to be large enoughe ( wingtra e.g. 1/3 of the wing)
Else this will happen: https://youtu.be/rvR_IEE5DQY
It works with full trust, while loose control in sinking mode. Therefore I changed to vectored Tailsitter.
And yes, like all discovered and are disapointed. The compromise of hover Props and speed Props destroys the long range hope in plane mode.
Good luck.
My advise is to begin with a commercial wing made of unbreakable materials and to put the CG where it must be according to the manufacturer drawing. To begin with a commercial wing that is proven to fly well and is crash proof will allow you to focus on tuning. At the end you will save a lot a time.
Choose a wing not too big, in the range 1 to 1.5m and 2212 motors 1200 to 1400KV on 3s and 20-25cm prop. It will be OK provided the wing weight is <1.5kg. The main problem with tailsitter is the wind, so for a given weight: the smaller the better in VTOL mode but for FF mode the bigger the better. You will find your own comprise depending on your objectives.
A dedicated airfoif like E184 or clarkYS is mandatory for a plank wing. For a swept wing, you can use a negative Cm0 airfoil but it depends on the design.
In my opinion, thrust should be vectored as it allow to recover from very bad situations and will avoid a lot of crashes.
Last recommendation, post a video as soon as you get your aircraft in the air, there are a lot of VTOL fan looking at this thread.
pierre
@losawing Thanks for the advice. You are definitely having more success with tailsitters than I am
I’m working on a small quad tailsitter; flat-plate delta wing with span of 440mm.
It uses the ESCs and motors from a Lumenier QAV250 and hovers at about 30% throttle with a flying weight of 800g. If I can get it into forward flight, it should cruise at up to 100kph, with a correspondingly high stall speed…
But I can’t get QHOVER set up right; the motors drop to spin_min when I switch from QSTABILIZE to QHOVER, and eventually (with the throttle stick centered) they suddenly go to high power and it takes off like a rocket.
How do you set up for a smooth transition from stabilize to hover? Perhaps there are some parameters I don’t know about; I tried raising Q_M_SPIN_MIN, but it had no effect on the tendency to fly away (although it might help to prevent the rapid drop to the ground which follows the rocket ascent). I checked vibrations, and they are below 20m/s/s at full throttle.
I have no particular setting to get a stable hover.
I have a very powerful (ratio lift/weight>4) quad flying with arducopter which had this kind of behavior. I have been unable to get a stable hover until I added a heavy battery to it. Despite the heavy battery thr_mid is set to 247. But there are no Q_thr_mid parameter and I think this parameter has been replaced by Q_m_thst_hover. Did you tried to lower it a lot ? Or just to test, add some weight or reduce propeller size.
I suppose the altitude controller has some difficulties to cope with high power because the middle throttle stick position give too much power and a position above middle is needed to gain altitude, this is a kind a vicious circle.
There are q_pz or q_az parameters in the list but I dont think they will be useful.
I also came to this conclusion. That’s why my efforts now are toward a wing optimized for distance on a central pusher motor, but with two smaller wing-mounted vectored lifter motors that can fold their props after transition.
I tried a coaxial push-pull configuration (on two different airframes), but was sunk by vortex ring state problems- if the rear motor had a high pitch prop optimized for distance, the airplane took off fine, then sagged back to the runway after perhaps 10-20 seconds once the ring got going. Got video, if you wish. Boring. Up. Down. Up. Down.
The three-motor config is as of yet untested- still learning about AP.
Thanks, I will take your advice. I’ve bagged the big plank wing over the weekend. I’ll shelve for later use. I’ll cut a X6 sized wing and laminate next weekend. I have the flight hardware and can start from there.
Sounds like an interesting project. I’ll really look forward to reading more. Have you considered a tri-motor configuration on your new project? There are some good nacelle designs here on the thread that are aerodynamically clean, so would not dirty up the airframe much at all.The question is really the weight and current drain.
Exactly my steps too. Eventually I was pushed to a 3-motor design.
For an aircraft total weight of about 3 kilos,I ended up using two SS 2212 size motors, 4s, with 9/5 props producing about 1600 g. lift each as lifters. A 57-gram motor with another 28 grams for tilt mechanism and servo and glass reinforcing. Add another 45 g. for rather long wiring and ESC, 10g. for prop and you can estimate the weight penalty for the small lifters. The third motor is a SS 2814-1100, 10/7prop, which might stall at hover, depending on the prop wash from the lifters, but it’s stalled thrust is easily enough, and is very efficient once airspeed picks up. Run the numbers. an hour at 40 MPH, allowing for one takeoff and landing. A first attempt at a trimotor tailsitter VTOL.
To sum up my findings: (ecalc)
– With a 10-amp battery, a bimotor powerful enough to lift the aircraft with safe excess thrust level, and props that won’t roast the motor, I get 28 minutes at 35 MPH. Sucks. The prop problem is well-known here on the thread.
– With the smaller motors above with folding props, and a third motor (opposite rotation) with prop optimized for reasonable distance, I get about an hour at 40 MPH. I can live with that, for a first attempt.
I will happily detail the design numbers you see on my posts here, if anyone wants.But it’s easy to run them yourself on ecalc, with the weight numbers above for a first approximation. This post is long enough already.
My trimotor wing is ready, and has survived a half dozen flights with another controller/software package, but the pilot is not! Afraid to risk the hardware, honestly, without advice beyond “use the default parameters, then weep softly.”
Personal stuff as well-kid in college with exams coming up- I’m the gopher while she studies till 4 A.M.—on my work table!
It’s important to have new posters with new ideas to keep the thread alive— and keep the wizards (spelled “Tridge” et al) interested. Very glad you are here.
I’m signed on for the duration, myself.
Sorry about the shortage of video. Take it or leave it, it’s what I’ve got. More p
Just at building the tilt mechanism. All 3D printed and uses an 8 mm carbon shaft with a large bearing on the end. I have a printed gear on the servo that gives me 1.5:1 with the fixed pinion gear. I get 180 deg travel with the standard pwm range. The servo counter weights the motor so the servo is not under a constant load.
did you find a solution to the hover problem on your small delta wing?
Could it be a problem related to an integrator building up ?
There are q_p_accz_I and _imax parameters. I have these parameters set to 0.5 and 400. Maybe for a very powerfull aircraft Imax should be limited.