was arming issue, fixed had it on 0 moved to 1 ok now
thanks
1 Like
It should work with any channels. I’ll give it some more testing
you may find some Q_A_RAT_PIT_FF helps too. With a vane control surface I think some feed-forward is appropriate
yes, sorry about that!
yikes!
I know this is a note to yourself, but if you want some help with log analysis let me know
FYI my “oh crap” control positions are throttle fully down, flight mode to manual. That pretty effectively kills the motors. Then I’ll disarm using the GCS.
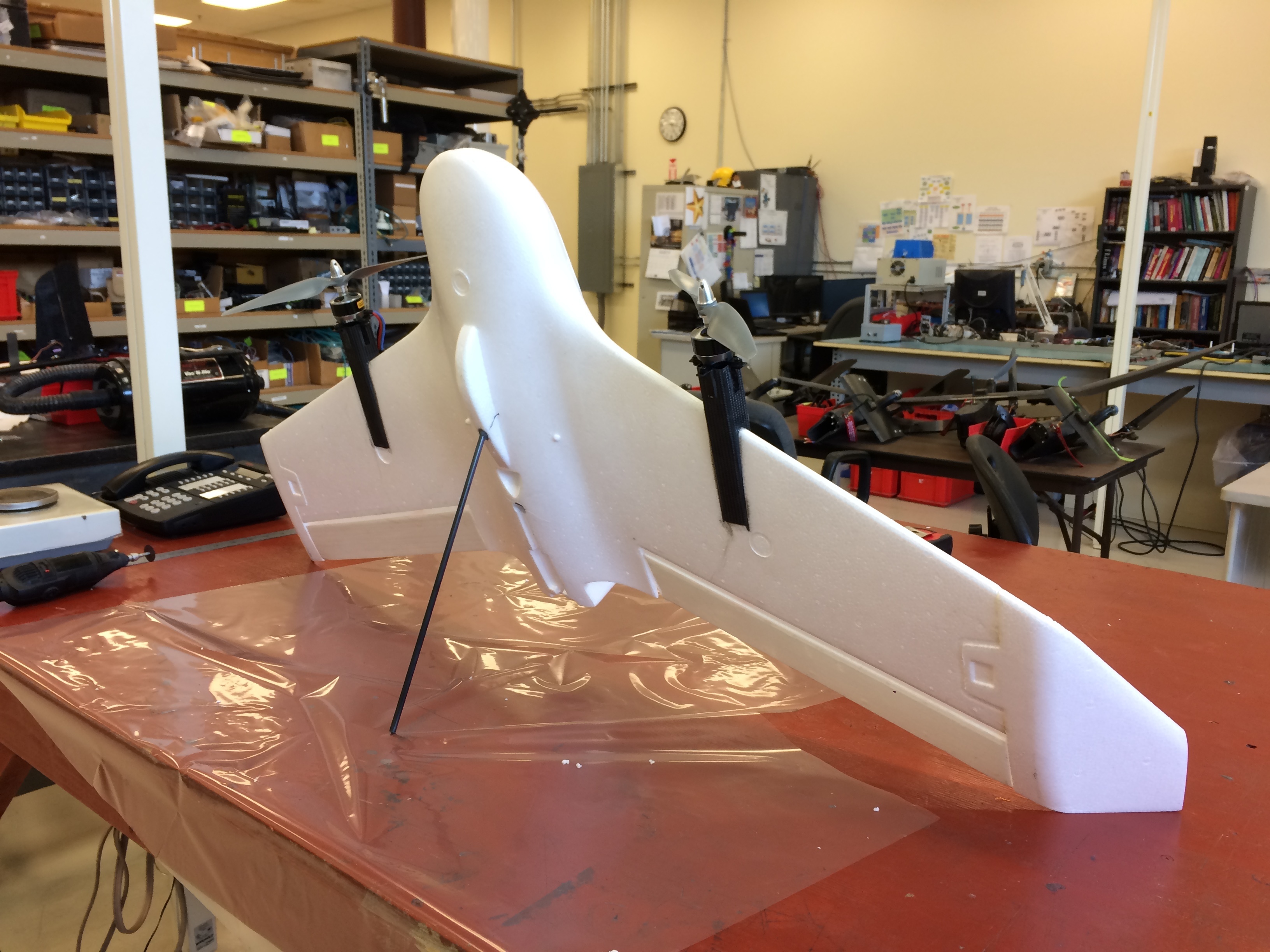
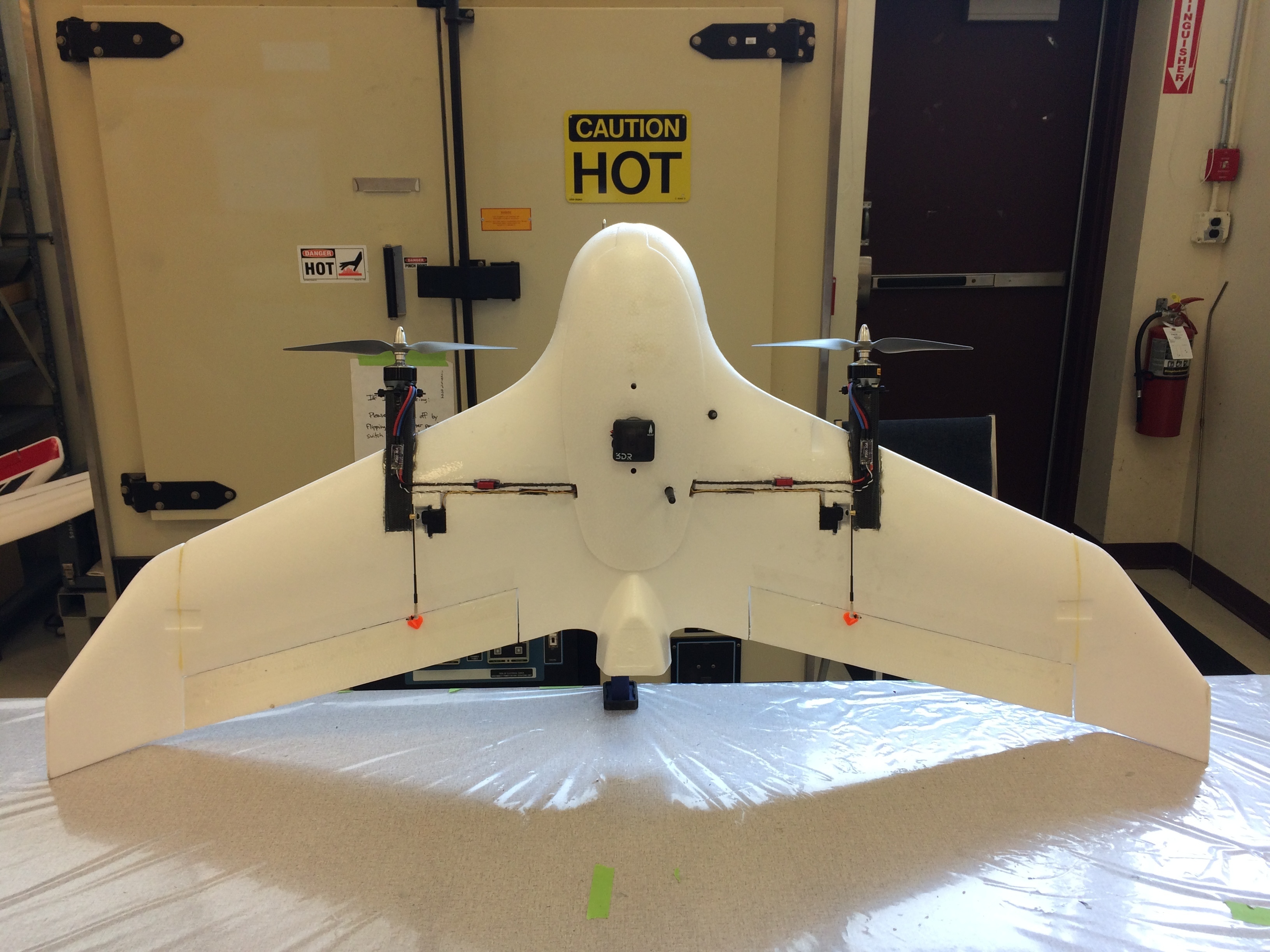
Here are a couple more pictures of my progress. I added the kickstand landing gear after my flight attempt.

2 Likes
yep, that will do it!
hmm, not quite sure what you mean.
Feel free to join our mumble chat if you want to get realtime help:
http://ardupilot.org/dev/docs/ardupilot-mumble-server.html
most people use google drive similar services
Mark wins first flight for a dual-motor tailsitter!
video soon …
1 Like
Go, Mark!
I hovered mine in hand, and it feels and responds like it should,
great!
note that Mark had MIXING_GAIN=0.5, which is the default. For a tailsitter I think MIXING_GAIN=0.8 or even 1.0 would be a lot better. Be careful though, as it will scale all your gains. So if you’ve already tuned for hover then backoff the gains in proportion to the change in MIXING_GAIN.
I think with 0.5 mixing gain you will be lacking in pitch authority
yes, pitch is slugish but locked in, roll to fast and locked in, yaw little slow and not locked in yet I also think q hover is going to work as well ! GO Tridge!
youtube video of the Stryker’s first flight with ArduPilot: https://youtu.be/3kIKLgSraLI
2 Likes
video or it didn’t happen!
if you’re having trouble uploading DF logs then you can email it to me at andrew@tridgell.net
some other tuning tips for tailsitters. I think a bit of feed-forward on pitch and yaw axis would be worthwhile. For example:
Q_A_RAT_PIT_FF=0.2
Q_A_RAT_YAW_FF=0.2
thats just a guess, but should be better than zero.
I also think that setting I equal to P on all 3 axes will help. By default I is a lot smaller than P for yaw, which is right for multicopters but not for tailsitters.
2 Likes
also, if you haven’t seen it, its worth reading this page:
http://ardupilot.org/plane/docs/common-transmitter-tuning.html
Mark used that for tuning his with some success.
I’ve just pushed an important fix for logging on tailsitters. The logging was in the fixed-wing euler view, so it suffered from gimbal lock. It now rotates the attitude logging when hovering. Makes it much easier to analyse logs.
what GCS software are you using?
Also, you can just grab logs directly off the microSD. Look in the APM/LOGS directory. The bin files are the ones we need.
1 Like
one more tip for tailsitters. I recommend using the new EKF3 instead of the EKF2 state estimator. The reason is that EKF2 only estimates Z accel biases for one axis, and that is the Z axis for fixing wing orientation. For a tailsitter what we primarily need is Z bias estimation for the X axis.
The EKF3 code estimates accel biases for all 3 axes, so it will probably hover better. To enable it change these settings:
- EK2_ENABLE=0
- EK3_ENABLE=1
- AHRS_EKF_TYPE=3
2 Likes
I made all of @tridge’s suggested parameter changes and I had my first successful hover this morning. I’m using earth-frame controls for hover. Here are a couple of things I discovered:
My leaning-forward takeoff position doesn’t work. The thrust of the motors is pivoting the aircraft around the point where that front kickstand is touching the ground, and it doesn’t have enough control authority to stop the rotation before it gets horizontal. After two attempted takeoffs from that position, we propped the aircraft up to near vertical (80 degrees) and had a successful takeoff.
Yaw control is good
Roll control is good
Pitch control is good, up to a point. The aircraft was hovering nicely for about 10 seconds. It was a little blustery, probably more than I should have attempted a first flight in, but I’m impatient. A gust came through and hit the underside of the aircraft, causing it to pitch forward. Despite full pitch-back input from me (and presumably the flight controller) it wasn’t enough to get the nose back to vertical and it started to fly away, eventually pitching down to roughly 30 degrees nose-up (from forward flight attitude). I was in a relatively confined area so I put it in manual and released the controls to kill the motors.
Looking at my logs, it appears that about 25 degrees from vertical is the point where the pitch becomes unrecoverable, but I’m sure airspeed is playing a part. Once some forward airspeed develops, I think aerodynamic stability is going to try to pitch the nose down. Any suggestions on overcoming this? My two ideas are to increase the size of the control surfaces (which seems to be common), or to use a way aft C.G. so the aircraft is aerodynamically unstable in pitch, and rely on the FC to stabilize it in forward flight.
I’ll post a video when I can get around to it; I need to get some actual work done before I can play with this project some more.
1 Like