it is auto-built by our build server. This is the firmware you want:
http://firmware.ap.ardupilot.org/Plane/latest/PX4/ArduPlane-v4.px4
good luck, and keep us up to date on this chat!
it is auto-built by our build server. This is the firmware you want:
http://firmware.ap.ardupilot.org/Plane/latest/PX4/ArduPlane-v4.px4
good luck, and keep us up to date on this chat!
Awesome; thanks! I got the motor mounts fabricated and glued in tonight, along with a lot of wiring odds and ends, so maybe I can get some control surfaces wiggling tomorrow.
great! photos/videos welcome. See earlier msgs for setup suggestions
I loaded the lastest arduplane build onto my pixracer, but when connecting with USB it times out, with the usual “no heartbeat packets received”. As a test I loaded the latest stable build of arducopter and I was able to connect to the board with USB, with no problems. I reloaded the same arduplane (latest) arduplane build that @tridge linked to, but I had the same results as before: timeout, with “no heartbeat packets received”.
Any smart suggestions? I did some digging around but I didnt’ find any obvious solutions, other than that there is an issue with the latest arduplane build for PX4 v4. @lorbass, can you send me the firmware file you used to load your pixracer?
@mrjadkowski
I loaded V4 from here: http://firmware.eu.ardupilot.org/Plane/latest/PX4/
Has the Pixracer a Memory Card?
May be, thats the reason.
If not, I uploaded the file here: https://www.hightail.com/download/dDZIRFFYT2J6RTk3czlVag
For me, it works.
@tridge I’ve set the servo and Q params as recommended for the Stryker, performed accel cal and roll/pitch are reported correctly. Motors start when armed in QSTABILIZE, but elevon servos behave erratically for ELEVON_OUTPUT set to 0,1 and 2. They don’t move at all till I throttle up a bit; shouldn’t stabilization be working at all times? My CC Phoenix 25 ESCs didn’t respond at all to the ESC cal procedure, but they were flying OK on PX4 before.
SERVO1_FUNCTION 74.000000
SERVO1_MAX 2000.000000
SERVO1_MIN 1080.000000
SERVO1_REVERSED 0.000000
SERVO1_TRIM 1000.000000
SERVO2_FUNCTION 73.000000
SERVO2_MAX 2000.000000
SERVO2_MIN 1000.000000
SERVO2_REVERSED 0.000000
SERVO2_TRIM 1000.000000
SERVO3_FUNCTION 0.000000
SERVO3_MAX 1900.000000
SERVO3_MIN 1100.000000
SERVO3_REVERSED 0.000000
SERVO3_TRIM 1500.000000
SERVO4_FUNCTION 0.000000
SERVO4_MAX 1900.000000
SERVO4_MIN 1100.000000
SERVO4_REVERSED 0.000000
SERVO4_TRIM 1500.000000
SERVO5_FUNCTION 4.000000
SERVO5_MAX 2000.000000
SERVO5_MIN 1000.000000
SERVO5_REVERSED 0.000000
SERVO5_TRIM 1500.000000
SERVO6_FUNCTION 19.000000
SERVO6_MAX 2000.000000
SERVO6_MIN 1000.000000
SERVO6_REVERSED 0.000000
SERVO6_TRIM 1500.000000
Q_ASSIST_SPEED 0.000000
Q_ENABLE 1.000000
Q_ESC_CAL 0.000000
Q_FRAME_CLASS 10.000000
Q_FRAME_TYPE 1.000000
Q_M_PWM_MAX 0.000000
Q_M_PWM_MIN 0.000000
Q_M_PWM_TYPE 0.000000
Q_M_SAFE_DISARM 0.000000
Q_M_SPIN_ARM 0.100000
Q_M_SPIN_MAX 0.950000
Q_M_SPIN_MIN 0.150000
Q_M_SPOOL_TIME 0.250000
Q_TAILSIT_ANGLE 30.000000
Q_TAILSIT_INPUT 0.000000
Q_TAILSIT_MASK 0.000000
Q_TAILSIT_MASKCH 0.000000
Q_THR_MAX_PWM 2000.000000
Q_THR_MIN_PWM 1000.000000
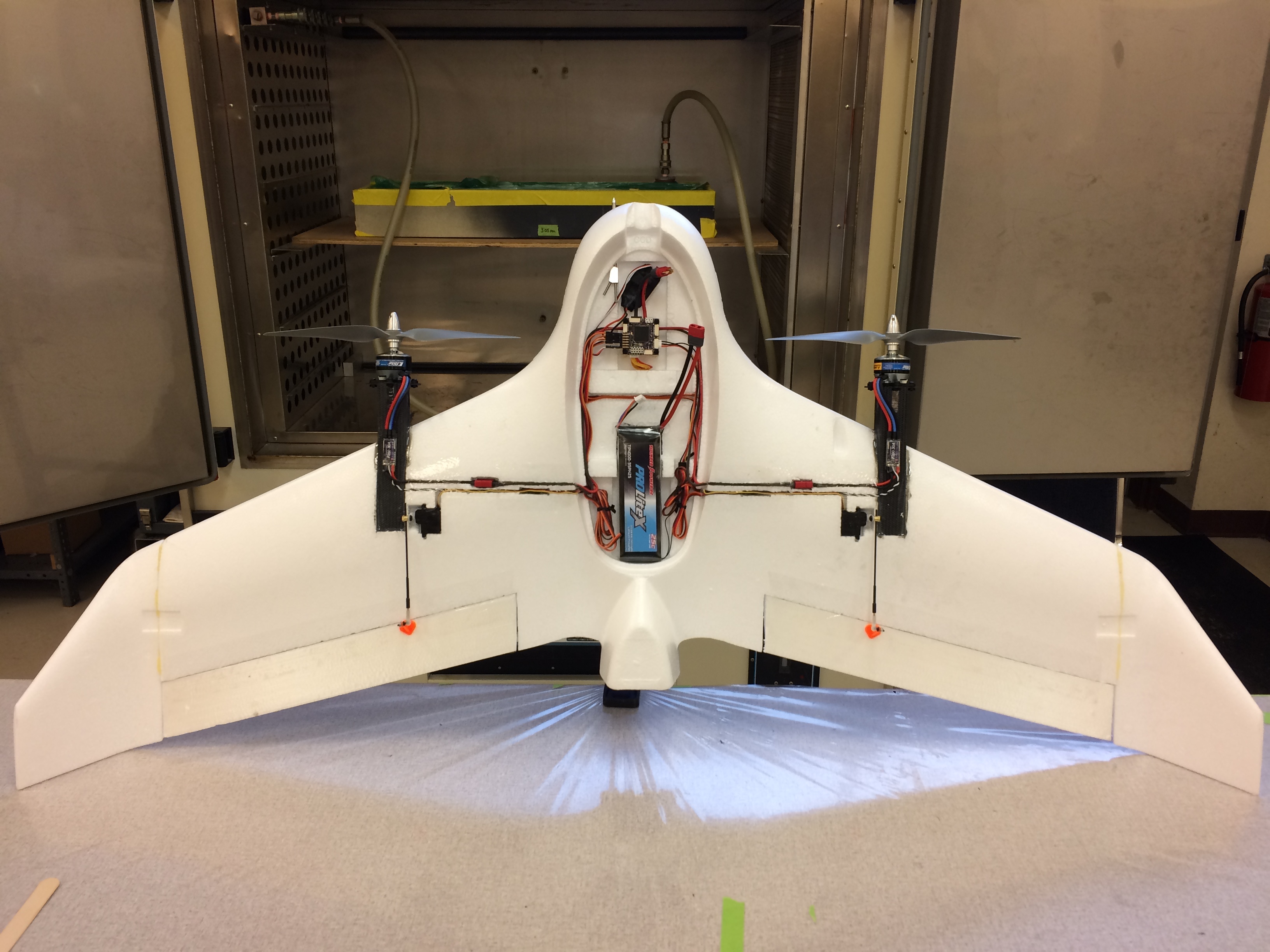
Nothing to useful to contribute; just a quick picture of my build so far. I still need to mount the GPS and SiK telemetry radio. The wifi telemetry included with the pixracer has been super unreliable for me. I’m at 1065 grams right now, with a predicted thrust of 2000 grams, so this thing should be a rocket ship!
Cool!!!, please keep update your progress 
you may find that updating the firmware on the WiFi radio helps. It was very unreliable for me until I updated to this firmware:
https://pixhawk.org/peripherals/8266
excellent! The race is on for who claims first flight on a non-simulated dual-motor tailsitter
@kd0aij, test the servos direction in MANUAL and FBWA mode, not in QSTABILIZE. In MANUAL check it is right direction for fixed wing flying elevon plane. In FBWA mode check it stabilizes in fixed wing attitude.
Also double check your RC input reversals. Non-reversed means:
Wow, that’s a pretty innovative takeoff and landing method. What flight controller and firmware are you using?
@tridge quadplane motors apparently must be assigned to channels above 4
with motors on channels 5,6: rudder input causes motors to spin even when disarmed (safety off)
with motors on channels 5,6: rudder input causes motors to spin even when disarmed (safety off)
Yikes! Good to know!
hi,my own controller ,basflight and inav, but I am putting in Triges in one of my tailsitters and looking forward to seeing the results
Are there any predefined MAVExplorer graphs for tailsitters?
you easily win plane of the year in my book!
A friend of mind here in Australia also saw your video and loves it just as much as I do. He’s going to build two of them and send one to me.
Are you at all interested in trying ArduPilot on your plane? I don’t expect it will fly as well as what you’ve done when we first try it, but I’m sure we can improve it.
Cheers, Tridge
I had my first “flight” in our shop. I did some playing around in Qstabilize to see how it felt, and it was making all the necessary corrections to pitch/roll/yaw disturbances and inputs. So we propped it up on the shop floor (I haven’t installed my “landing gear” yet), and gave it a go. It was pitched slightly away from me on launch, so it corrected and overshot so it was drifting back towards me. It was slowly bringing the nose back to level, but I cut the throttle and went to manual so it could drop to the floor. No harm done; I took a chunk out of a prop so I swapped it out. It definitely needs more Q_A_RAT_PIT_P; control displacements for pitch are pretty minimal right now. Roll control (differential thrust) is good and it is compensating for the adverse yaw as well.
After coming back to the bench I noticed this note in the wiki: “The QuadPlane code requires GPS lock for proper operation. This is inherited from the plane code, which disables inertial estimation of attitude and position if GPS lock is not available. Do not try to fly a QuadPlane indoors. It will not fly well”
Whoops!
great!
can you post a link to a dataflash log? That will allow me to check parameters and firmware version.
Cheers, Tridge