Hello everyone,
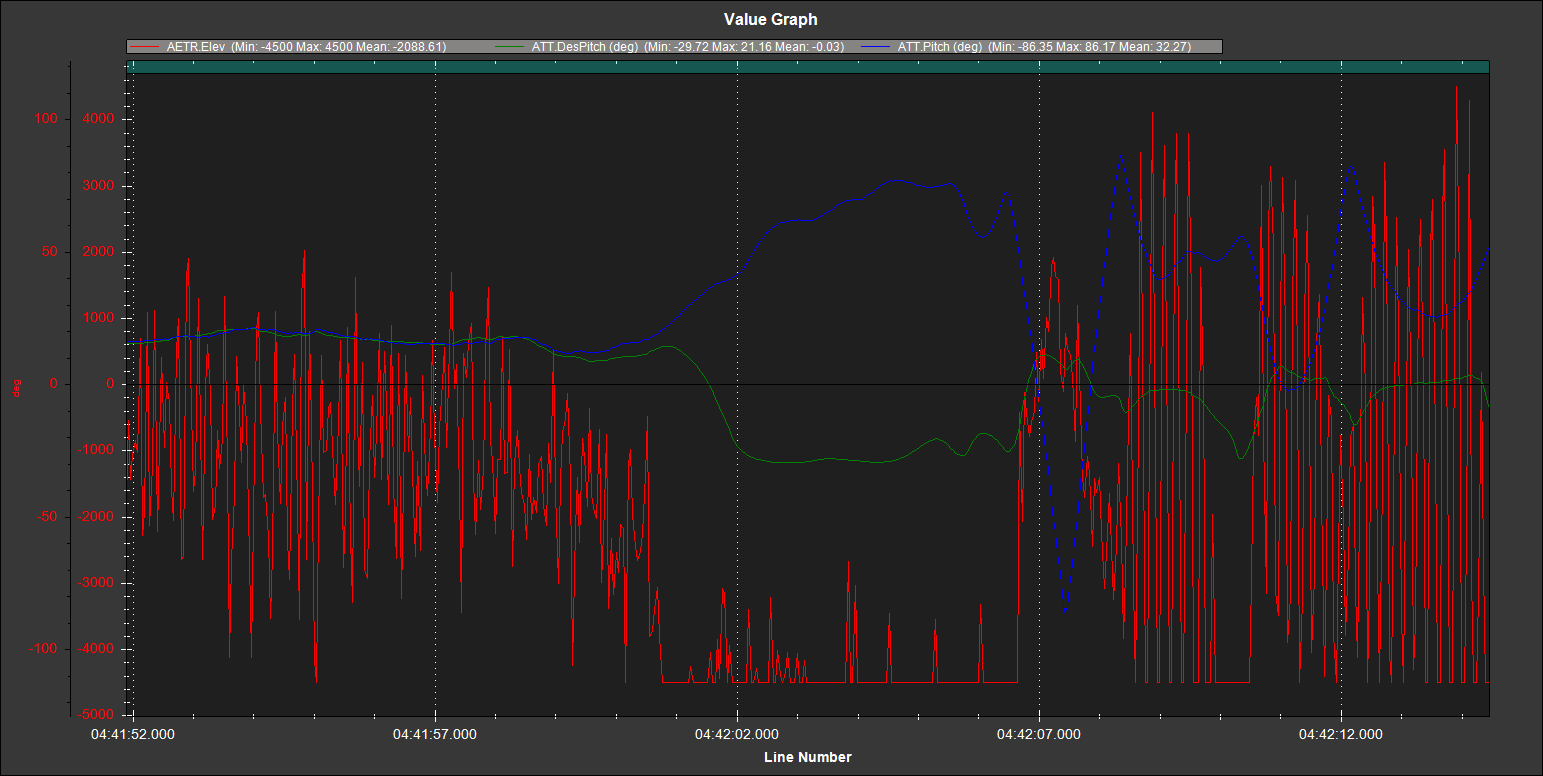
I have an issue related to a non-vectored dual motor tailsitter leaning on the pitch axis and unable to recover after hovering for a couple of minutes. This happens every few flights and usually ends up in a bad crash. The tune doesn’t seem too bad and I’m not sure where the problem is, the control surfaces are pretty large, almost a third of the wing, which I believe should be enough to recover.
I have the logs from two planes one with control surfaces slightly larger than the other. Both seemed to have similar issues in hover and servo saturation although in most flights it performed fairly well even in wind. In some cases this happens during take off where it directly flips in one direction without taking off. All the flips happen pitching backwards. Some after a decent forward flight and back transition.
I am unable to identify the exact issue from the logs.
Plane weight: ~2 kg
Max Thrust: 4 kg
Propellers: 15 x 5 inch
Wing span: 1m and 1.2m
Servos: Hitec High speed metal gear analog
I have had about 10 crashes from this in the last two months over 2 models. I have the logs of all the crashes in the LINK here.
Here is also a LOG of a good hover flight and landing.
It would be helpful if anyone had insights as to why this is happening. I want to know if it might be an issue with the tune.
Thank you