I started with “Latest version of Mission Planner” per AP site.
Drop-down menus in Setup were not appearing.
Researched that problem. Said to load Beta version (as you state). Did that. Drop-down menus still did not appear.
Researched more. Found online a recommendation to solve this issue was to try the previous version (1.3.74), so I did.
Drop down menus and everything else work on 1.3.74.
This is likely because of your configuration not the version of MP. I load the Beta version everyday. Today the option to select the version of firmware for the simulator appeared (cool). Greyed out dialog boxes, pull down menu’s not working, missing parameters; all often solved by a Beta update.
OK, re-opened 1.375 and connected. Drop down menus are now appearing .
Checked frame class, type and Servo outputs. All are saved as with 1.3.74 setup.
Now downloading latest Beta
Motor test still not working
BTW-A reboot/power cycle is required if Outputs, and some other things are changed.
Beta version 1.3.75.1 (see image).
Everything seems to be working properly with settings same as I had with previous MP version.
Motor test still not working. Rebooting often

1 Like
@dkemxr
Hey Dave, you’re not gonna believe this.
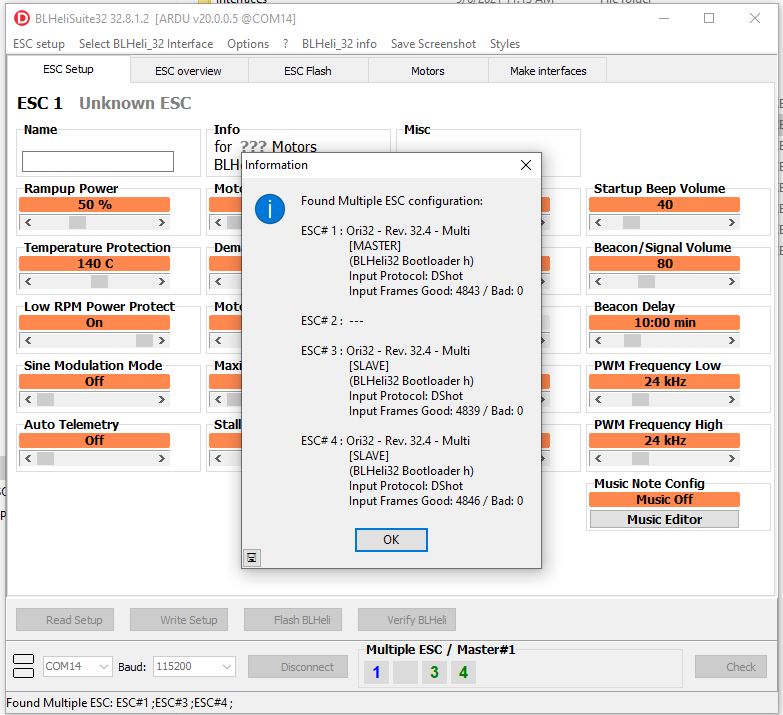
Progress! 3 of the 4 motors are now spinning in motor test! Short video clip here . AND, I’m now able to connect to BLHeli32 Configurator (image below showing ESC2 “bad” perhaps).
I’m gonna take this as a “Major victory!” Thank you SO much for your time & suggestions!
I have no idea what’s changed, perhaps the Beta version?
In any case, now I can start working on trouble-shooting just one motor/ESC.
I have an extra motor & ESC laying around if needed (always try to have spares)
Thank you again Dave! Very much appreciated!
1 Like
32.4 is pretty old. You may find things improve once you have updated to 32.8
1 Like
@andyp1per @dkemxr
loose wire in JST connector caused ESC2 issue
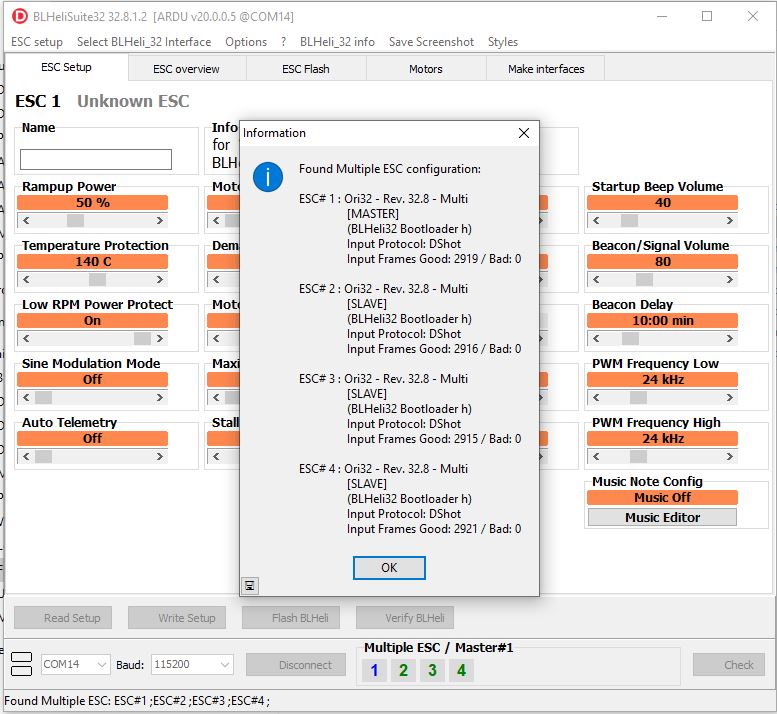
All ESCs updated to 32.8
Now working on correct motor mapping and spin direction.
Making progress thanks to Dave’s and your help.
Thank you!
1 Like
Tom great it is solved now,question for you Dave or Andy have you tried with different PWM frequencies and what was the results,many thanks
The latest version of BLHeli32 has an auto option - I am using that
1 Like
Im using BL heli 32.8.1 and have a low and high PWM rate that are on 24 by default but cannot see a auto box
I think if low and high are different then it will select the best between them
1 Like
Thank you kind Sir will play with that latter
It depends on the orientation of the ESC on your frame but with 4in1’s it’s often easiest to use BetaFlightX for FRAME_TYPE. With the battery connector off the back most 4in1’s will then align the correct motor number with the arms. if you know what I mean ![]()
1 Like
@MartyMcFly @andyp1per
Pretty sure the “high” and “low” PWM Rate is “Variable PWM Rates.”
For instance, you can set “Low” to 24 and "High to 48 and quad will auto adjust between the two to optimize based on how you’re flying (at least, that’s how its supposed to work!)
I have not tried “variable” yet myself. Since I fly mostly 3"-4" quads, I normally use 48KHz with RPM filters (bi-directional DShot). It’ll be fun for me to see how the equivalent works here with Arducopter
1 Like
Thanks Dave. Yes, I understand what you’re saying.
The 4-in-1 I’m using doesn’t have the same motor orientation as what’s expected in Arducopter even when batt leads going out the back (like I do have them). So, I do need to remap.
I’ve done remapping numerous times on other firmware, so I’m somewhat accustomed to it.
I have successfully remapped all of them and got the correct motor spin down in BLHeli32.
All motors working properly in Mission Planner.
Next step is to fix the “won’t arm issue.” Haven’t even had the chance to look at that one today (Tuesday).
I’ll be working on that one Wednesday morning (EDT, U.S.)
Never new that Dave,thank’s you for that info,will help me in the future
I should note that Tom is right about the Ori32. For some reason they use a non sensical order on that 4in1. I have one but others I have use the Betaflight motor order if using a typical ESC orientation on a quad.
1 Like