Hello @andyp1per
I have four flight controllers, and I have checked all of them about the type of the MCUs
1 and 3
2 and 4STM32F427 rev3(2MB) + STM32F103(crystal 8Mhz, flash 128KB)
updated:
I am using the fmuv3 image on them.
BR cctsao
andyp1per
June 29, 2023, 5:32pm
23
I have uploaded Pixhawk1 firmware to the site, it assumes 24Mhz crystal F100
1 Like
Hello @andyp1per
That would be great, thank you.
BR cctsao
xfacta
June 29, 2023, 11:51pm
25
What were the initial parameters used and how is the attitude control for that bear?
2 Likes
The bear wants to fly but it’s too fat to fly.
1 Like
Hello @andyp1per
Testing result 1 >>>>>>>>>>>>>>>>>>>>>>>>>>>>
I update my flight controller (4), and I got the following messages
2023/6/30 20:57:26 : Config Error: Failed to update IO firmware
Testing result 2 >>>>>>>>>>>>>>>>>>>>>>>>>>>>
The previous log was taken from the flight controller (4), IO is stm32f103, result failed.
I update the pixhawk1 image to the flight controller (1) it works. IO is stm32f100, result passed.
2023/6/30 23:10:07 : PreArm: Accels inconsistent
andyp1per
June 30, 2023, 3:59pm
29
Thanks, it specifically will not work uploading the dshot firmware for f100 to an f103
1 Like
cuav_le
July 4, 2023, 6:00am
30
CUAV v5 runs V4 firmware and cannot support dshot600, please help me to check him. pixhawk v6x works flawlessly.
Greetings. Trying to reverse channels on my Durandal and no success.
Motor 1 needs to change direction. When selecting motor 1 under blh_rvmask I reboot the fc and also do hard reboot of the esc’s but the direction does not change
andyp1per
July 4, 2023, 8:52pm
32
Do you have SERVO_DSHOT_ESC set?
Evening Andy. let me have a look…
Yes SERVO_DSHOT_ESC it is set to 1.
andyp1per
July 4, 2023, 9:40pm
36
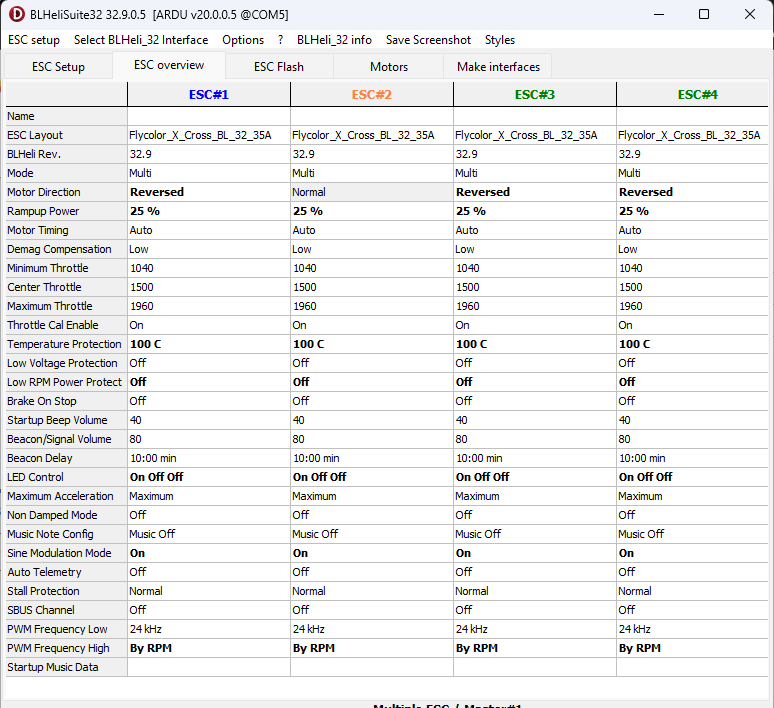
And you have BLHeli32 ESCs rather than BLHeli_S?
Yes that is correct ill attach the blheli32 suite info
Just plugged motors back into AUX channel and assigned motors 9 to 12 and reversing works
andyp1per
July 5, 2023, 8:27am
39
Ok, thanks for the report - I’ll see if I can replicate
I also noticed that when the motors were connected to the IOMCU that blheli did not connect due to an error that stated that no active motors were connected.
andyp1per
July 5, 2023, 11:11am
41
You presumably have the safety button pressed? Did you check the motors turned?
andyp1per
July 5, 2023, 4:35pm
43
Thanks for the report - it was a bug which I have fixed. I have put up a v5 in the same location - please test. Thanks!
2 Likes