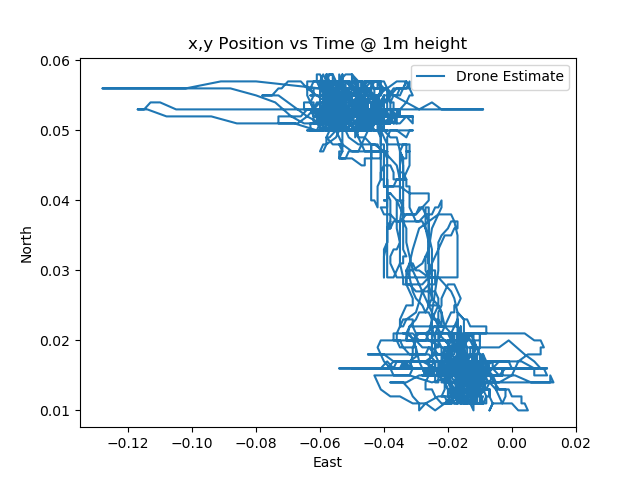
Attached is the result of a drone armed and flown in guided mode to 1m high, then left to its own devices.
I grab the position via the vehicle.position over mavlink - see first attachment.
The second attachment is the same only also showing the gazebo’s view of the drone’s position. I get the gazebo’s view by subscribing to to one of its publishing channels.
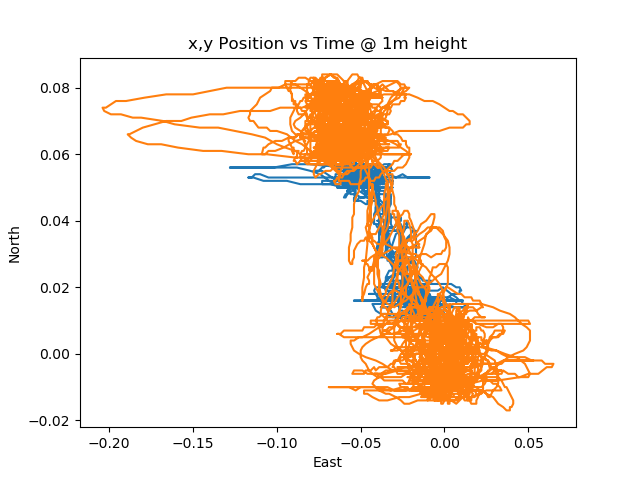
You can see that the simulator’s view matches the drone’s view but it would seem perhaps there is a scaling and offset factor.
I have two questions:
-
why is there an apparent scaling and offset between the two?
-
why is there what appears to be a bimodal clumping - where the drone favours two positions?