Hello I am new to dronekit and am attempting to connect a pixhawk orange cube with Arduplane V4.3.1 Firmware with Jetson Nano. When running connection script with “connect('dev/ttyTHS1”, baud=57600, wait_ready=true)", my terminal returns:
“CRITICAL:autopilot:PreArm: AHRS: EKF3 Yaw inconsistent by 77 deg
CRITICAL:autopilot:PreArm: GPS 1: Bad fix
CRITICAL:autopilot:PreArm: Radio failsafe on”
The script then does not execute any other commands. TIA
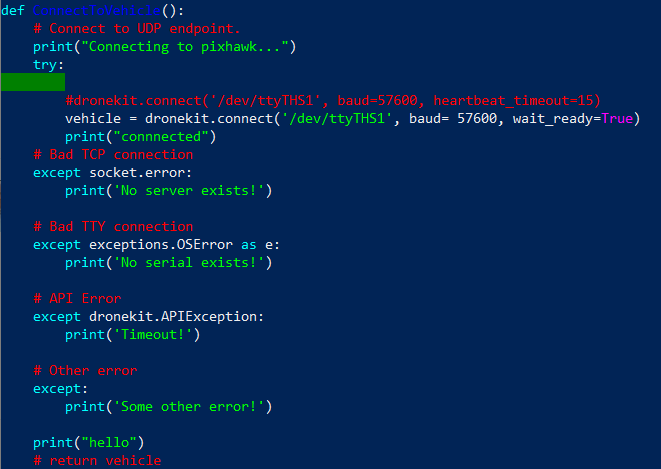
Ok thank you for the response. So I fixed all of the prearm checks so that should not cause any issues. However, I still run into the error in which the connect() function fails. I am not getting any errors such as “no heartbeat”. I have a photo below of the dronescript I am attempting to run.
Hello
You try to connect to ttyUSB1, what type of device is associated to this USB port?
Is this a usb to serial converter or the usb interface of the flight controller?
Hello sorry the original screenshot was incorrect. I updated it with the correct one. I do get a connection using these parameters. I get a link when testing in mavproxy as well. However, just like with dronekit, in mavproxy I am unable to change modes and do basically anything.
So I just tested a new pixhawk under the same exact conditions and was able to get a connection. I guess there seems to be an issue with the pixhawk orange cube, but I am not sure what the issue is.
Orange works pretty well, you can connect directly USB to USB and map your script accordingly. Check first with lsusb to make sure you connect to the correct port as the Orange is mapping 2 ports : Mavlink and UAVCan