Hi everyone!
We are building a GC over web, using a RB as a companion computer, python and DroneKit.
In general we have almost all drone controlled, but Im having problems when I want to roll right or left, and backwards. Forward works great.
Here is a video of our GC and a MP drone simulated. Just FYI, with a real drone the problem is the same.

As you can see, just forward do what it suppose to do.
Here is the code that im using to move the drone
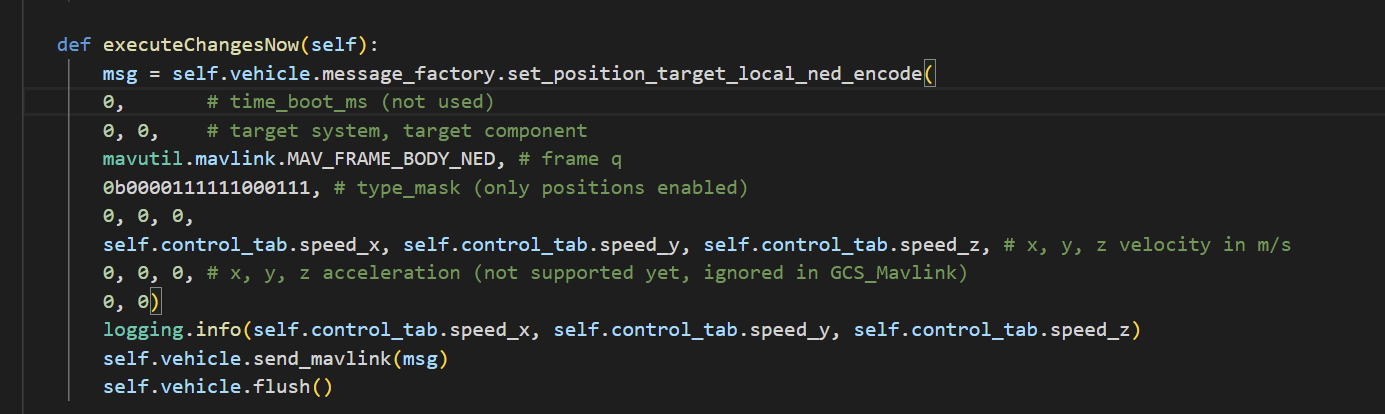
I already validate just the correct numbers go with the X and Y speed.
Why is the rolls and backward make circles?
hope you can give me a hand.
thanks!