Hi all,
I want to send position and velocity commands to my drone using dronekit, can i send new command every 0.1 sec or the minimum time is 1 sec?
I saw this note in the documentation:
I’m not sure if they recomend 1 sec or is it the minimum time.
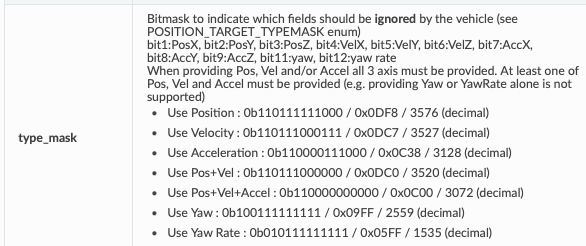
In another case, what is the bitmask for sending velocity commands with dronekit?
I found multiple places saying different things but I was never able to send the commands.
Hi @Amit5001! You can send it at any intervals you want. When you send the position set point, you need to send it only once. However, if you want to send a velocity or acceleration target, you need to send it continuously in a loop, recommended at least at 1 Hz.
For the velocity target (xyz), the bitmask will be something like 0b0000111111000111, or the integer equivalent 4039
just to make sure I understand you correctly- in case I want to send velocity commands, i can send it every 0.1 sec but need to send it continuosly for as long as i need to.
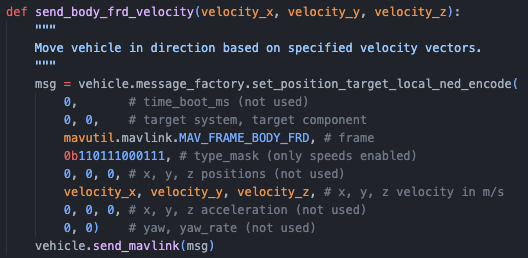
currently i tried to send velocity commands with this function:
beside the bitmask, do you think theres anything else tha problamatic?
I use MAV_FRAME_BODY_FRD because i use optical flow and not GPS
about the bitmask, the ardupilot documentation is outdated?