Hi all,
I have a platform with DroneCAN ESCs and I want to enable the "Take-off abort by RPM” feature.
But, it looks like this option can’t use negative values.
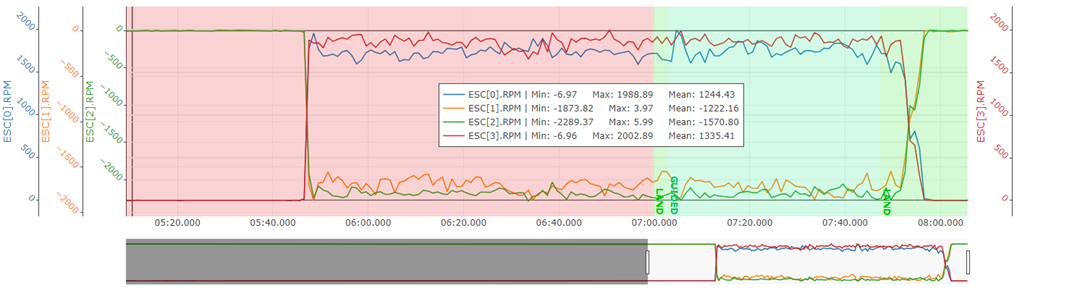
When I enable this option, the takeoff is aborted even though I have RPM telemetry from all of the ESCs, 2 ESCs with positive values, and 2 ESCs with negative values.
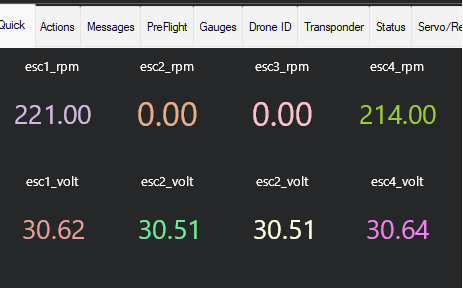
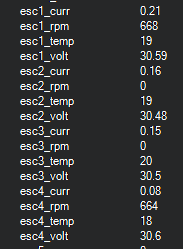
Also, I’m using mission planned v1.3.81, and under the Quick tab, and Status tab, the ESC RPM shows 0 for the motors with the negative values.
In my testing I saw that it DID affect notch filter tracking, or at least as reported by the Filter Review Tool. I’ve found some small differences in the way the web tool behaves vs the onboard code, so I have been meaning to circle back and check that. What I saw was that for ESCs that were reporting negative RPM, the filter tracking would drop to the minimum value. My ESC vendor released a patch to their firmware that allows for the RPM to be reported as always positive regardless of the direction, which I think will help, but we’re waiting to close hardware loops and get more test flights to be sure.