Hi everyone,
I hope someone can point on the right direction with this. Attached is a Log file
Thank you,
Ivan
Hi everyone,
I hope someone can point on the right direction with this. Attached is a Log file
Thank you,
Ivan
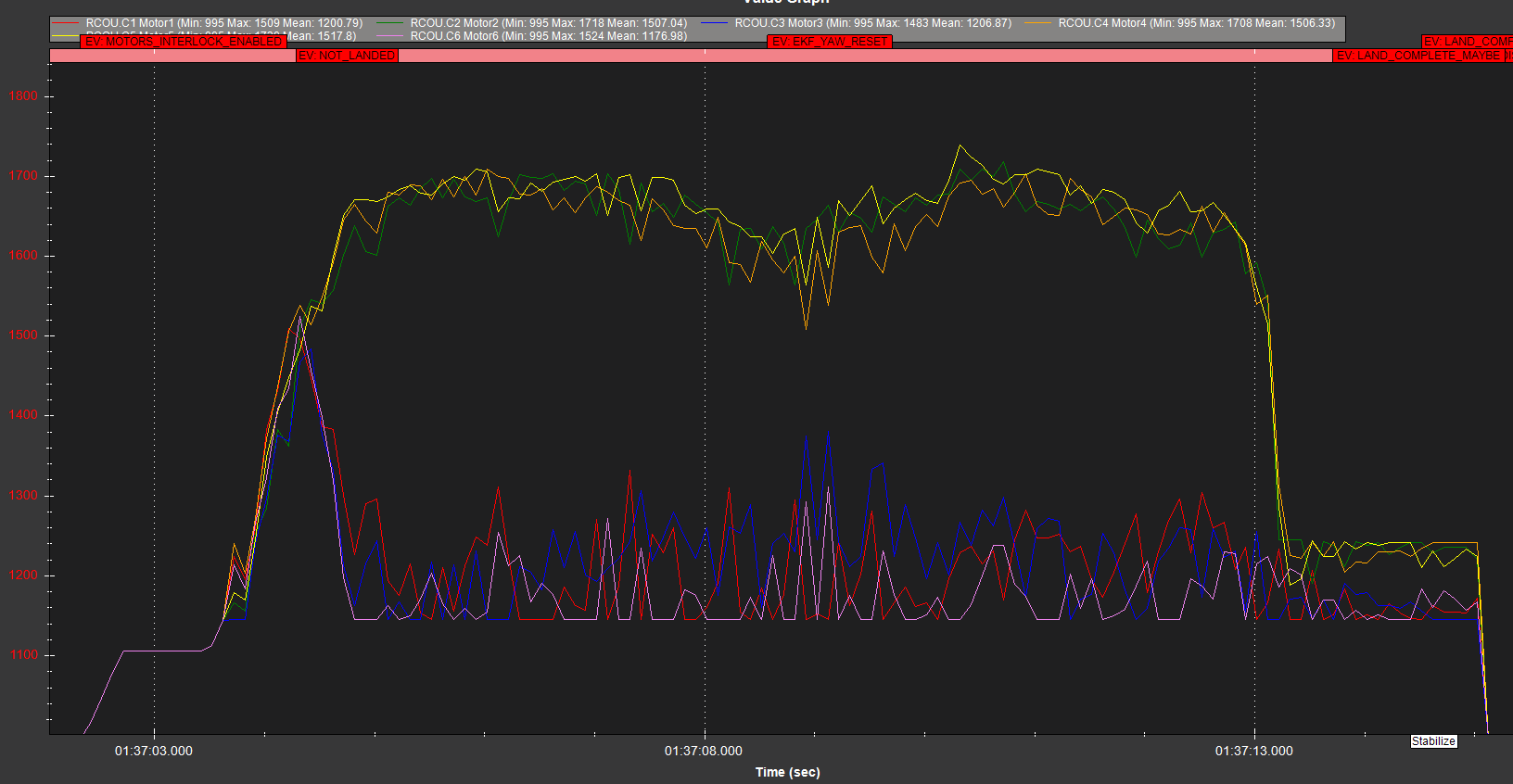
I looked at Log2 - seems like you had bit of a moment there.
Also the copter seems very unstable, but this could be because of the serious motor imbalance problem
3 motors are providing nearly all the lift and trying to counteract what is probably a twisted motor mount on one of the other three motor mounts.
Have a very close look and make sure all the motor are sitting perfectly horizontal and not twisted compared to the centre of the frame. It’s easiest to see this in the props.
You should be able to arrange all the props in a circle, and looking from the side all of the prop tips will be lined up (pointing at the neighbouring prop tip). You’ll be able to see which prop tips are angled up higher and lower than they should be, and fix that motor mount.
This has to be quite exact.
Also use Loiter instead of PosHold, it’s so much better and there’s parameters to adjust it’s behaviour.
Set these before the next test flight:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.2
INS_HNTCH_FREQ,100
INS_HNTCH_BW,50
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
The HNOTCH settings will need a bit of adjustment later but they’ll be fine for now.