Or do you think that it might make the attitude control better?
I think it will make attitude control better. And we just dial back a few things to suit the gimbal, or some other payload.
Hmm, Ok. I will try to do a autotune flight without the gimbal. Do you have any tips on how to reduce the vibrations in the video? I do have some dampners inbetween the gimbal frame and camera itself.
TBH i have no idea if the vibrations come from the frame or from the gimbal dampners.
termo2 - YouTube - The video is here.
@xfacta
can you help me with this log also? I have tried multiple times, but i am unable to get a good compass cal out of it. Can you please tell me what settings you used?
Thanks
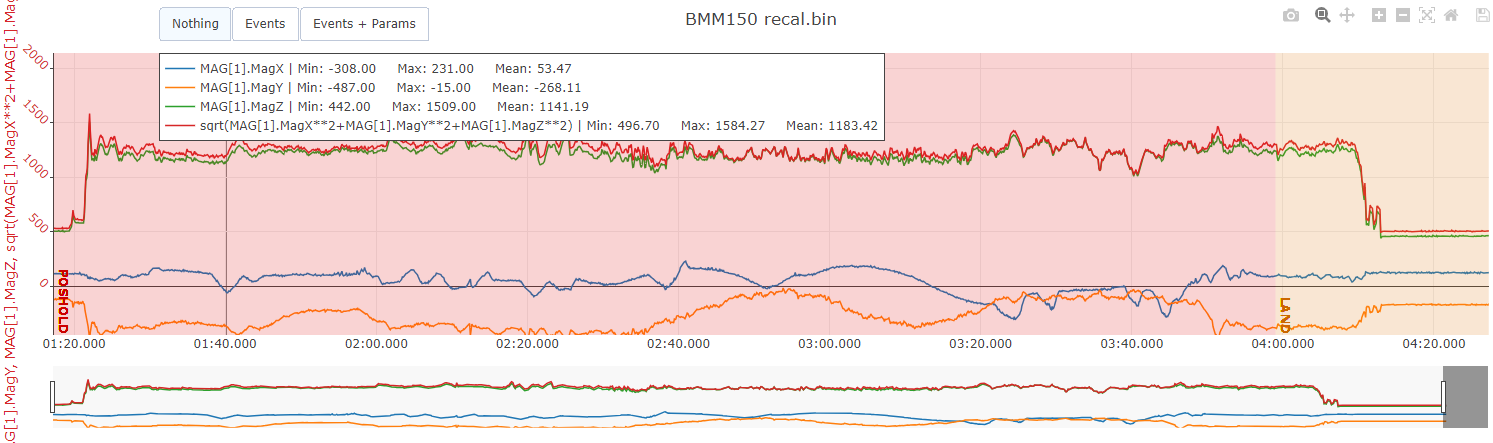
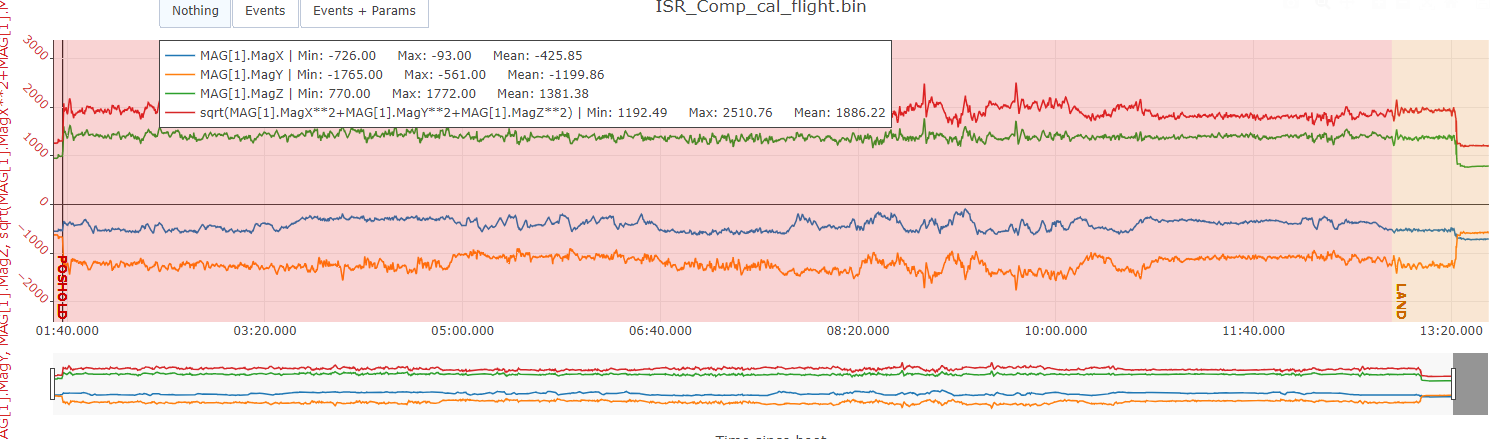
You have some fairly terrible interference on the compass that Magfit probably won’t solve. These are both equivalent really in terms of highlighting a problem. The correlation is so good you could use sqrt of the mag as a current monitor ![]()
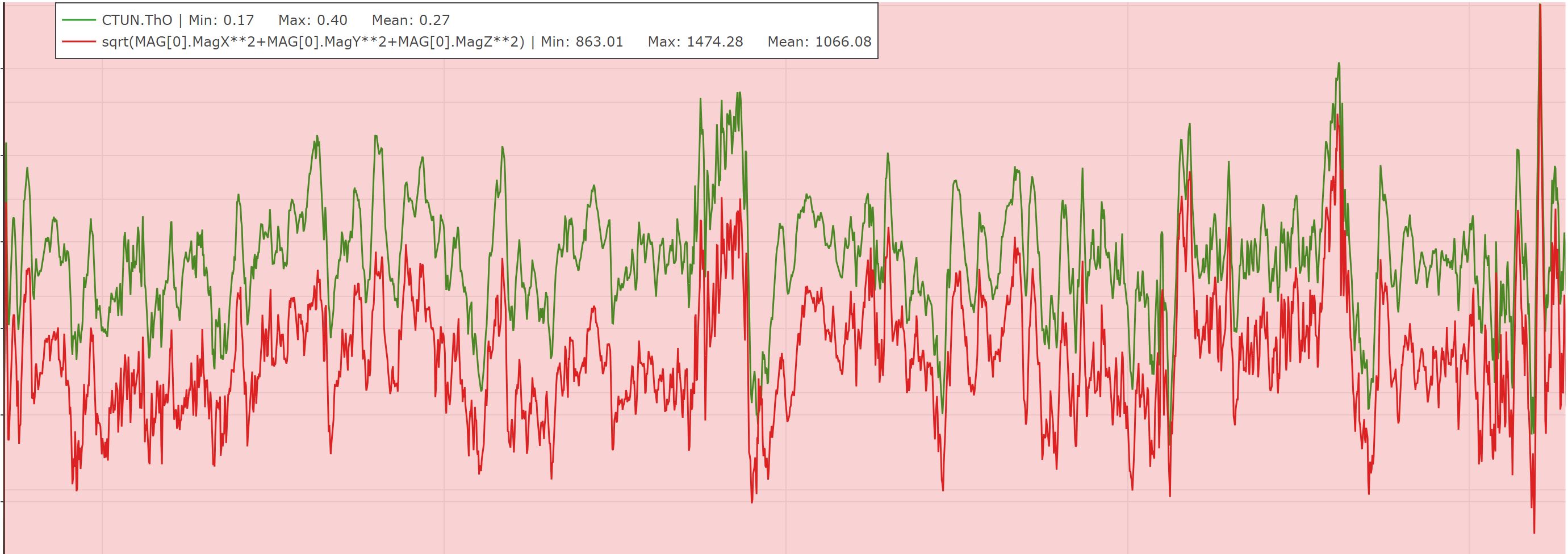
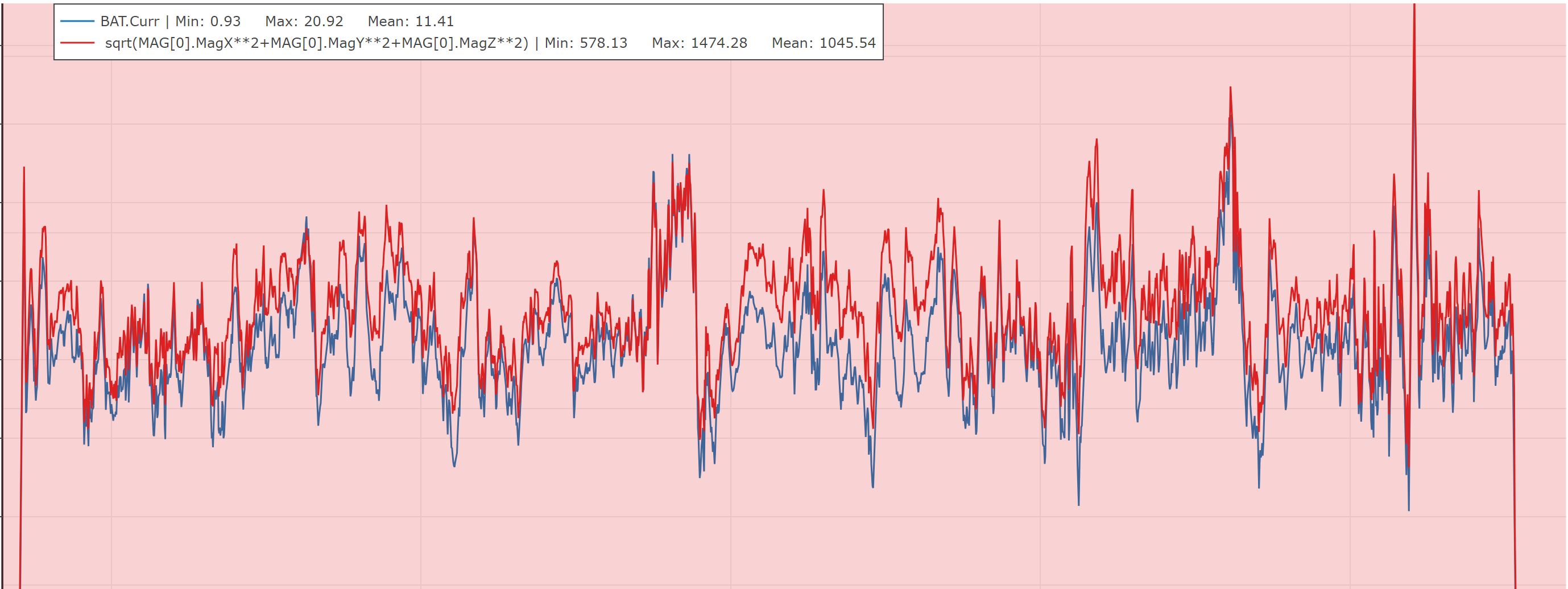
Nope, I tried.
This is a new log. I made physical changes to the drone itself. It has an external compass also that i did not use bc the initial calibration gave me results that were worse.
Hello,
Here is the updated flight. I changed things on the hardware side. WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
When I take off, then I experience no toilet bowling, it does the yaw reset as intended, BUT. If i fly in a direction, the drone yaws and gets the right heading as it actually is. After that the heading is correct and everything is fine.
Is this log sufficient enough to get a reasonable magfit with it?
@Allister @dkemxr
No. It iterates forever and produces max scale compass MOT values and a very high Z-offset so I don’t think it’s good. What did you change on the hardware side?
I have two 2in1 esc-s that have a battery wire traveling through the fuselage.
a section of that wire was not twisted. I twisted it and used EMI shielding tape on that wire.
I also shielded with EMI tape other battery wires that are going for example to the camera and gimbal. Since it is a fairly small platform i do not have a really good place where to put the compass.
I also use steel screws to hold the autopilot in place, but i doubt that is contributing. Since the magfield corresponds to the battery current.
Both compasses are getting a high Z value.
Can you post a photo of the drone?
This is what I can share.
What you can see from here is the gimbal controller with the large connector, underneath that is the 2in1 ESC. In the middle of that ESC (Between the two jst-gh connectors) is the twisted battery cable coming from the second 2in1 esc

I think you simply need more isolation (distance) from an external module. Consider a discreet compass module perhaps.
I will try to place the external compass to a different location
Even one of those cheap GY-271 boards might work placed far enough away.
Main issue is that the only place where i could put is under a 1w radio. That would be 7cm away from first esc, but right ontop of the second while just the battery inbetween
You could try the Matek AP_Perip CAN RM3100 board. Those are reported to be more immune to local interference. I don’t have direct experience with this but they are not that expensive to try.
They do suggest >10cm from interference producing conponents.
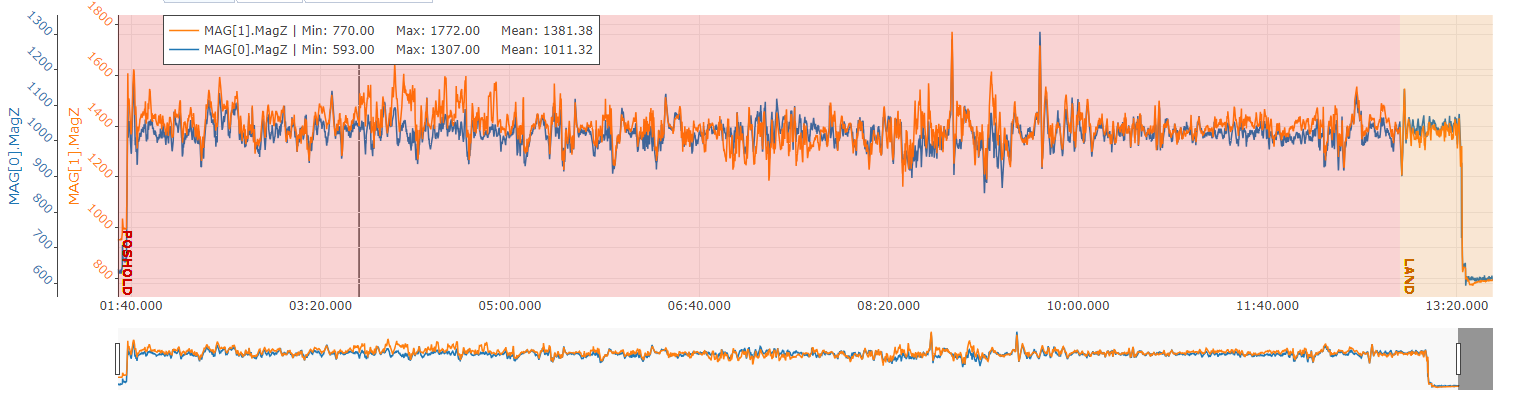
I tried an external compass 10cm from first esc, 10cm from the bottom esc. Although it is right on top of the battery (maybe 5mm distance) I still get a worse result than the internal one:
INTERNAL -
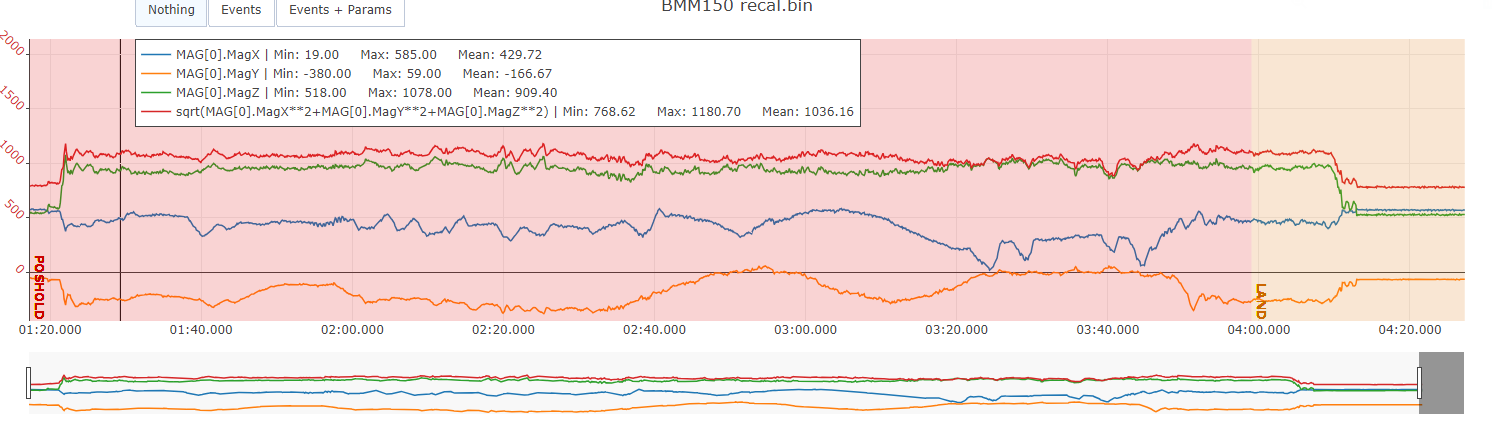
External
Edit - X and Y seem better than yesterday. Way better than yesterdays position -
It needs to be away from all electric current.
Then run Magfit on it and try it.