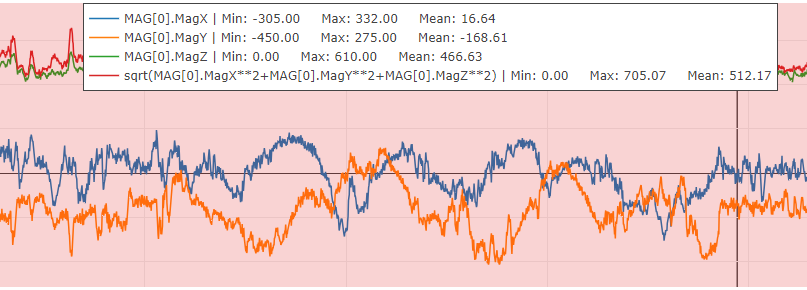
Tried it and it did not do anything better. Here is another log of todays flight. The external compass is now mag0, because I have set it to priority 1 and i am not using the internal compass.
I couldnt see anything obviously wrong.
Magfit gave me these, some are different so maybe that will help a little
COMPASS_OFS_X 623
COMPASS_OFS_Y -557
COMPASS_OFS_Z -4
COMPASS_DIA_X 0.800
COMPASS_DIA_Y 0.911
COMPASS_DIA_Z 0.800
COMPASS_ODI_X 0.200
COMPASS_ODI_Y -0.200
COMPASS_ODI_Z 0.178
COMPASS_MOT_X 10.000
COMPASS_MOT_Y 10.000
COMPASS_MOT_Z 3.615
COMPASS_SCALE 1.00
COMPASS_MOTCT 2
Otherwise try Yaw Autotunue with D term.
Set these:
Tried these parameters. Was somewhat better on the first flight, but on the second one i had terrible toilet bowling.
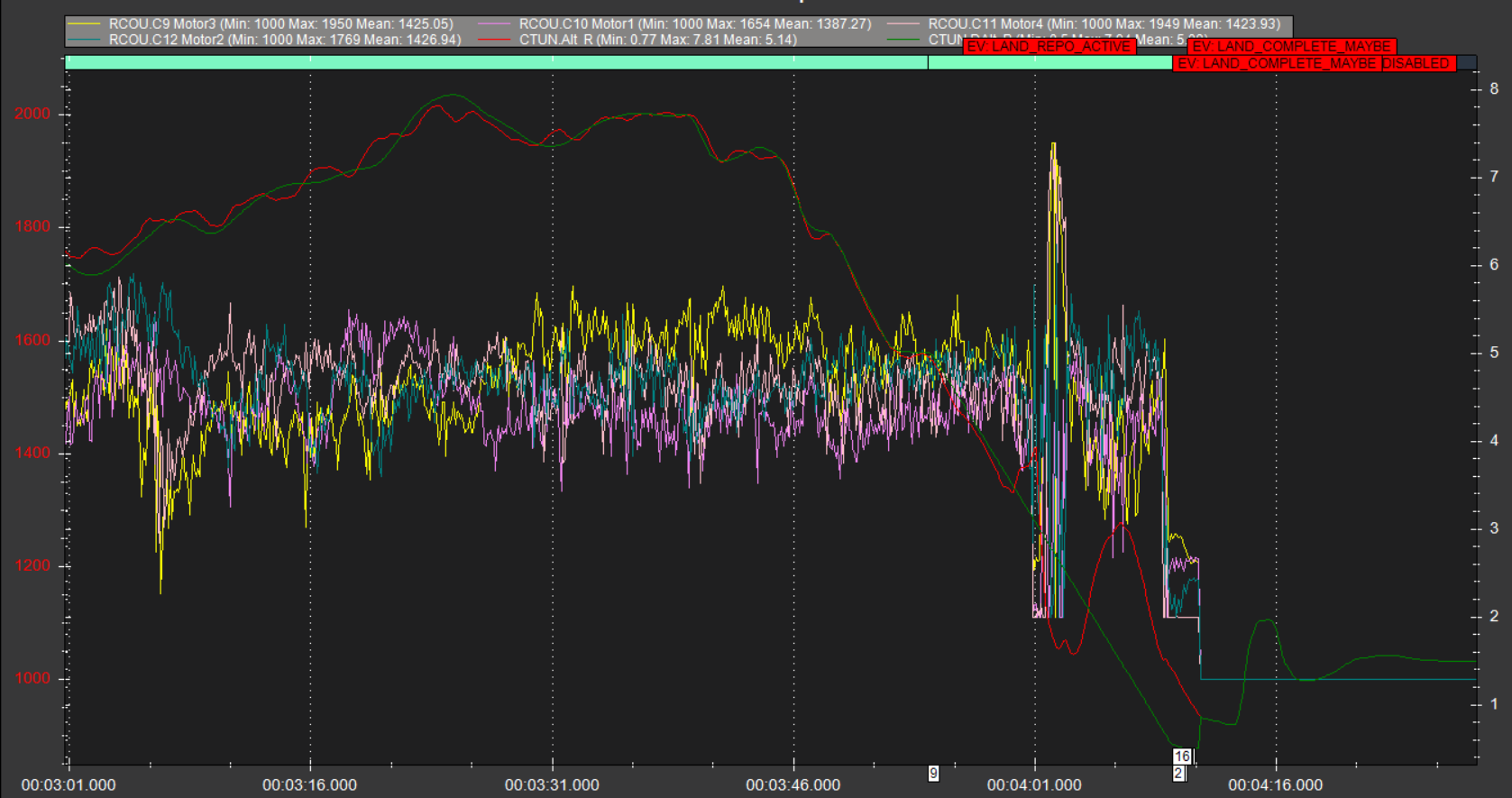
The issue that I had on my last flight was that the drone did touchdown in “land” mode and then immediately took off again against any pilot input and it was still in “land” mode.