Hello,
I’m having trouble getting my quadcopter to lift off. I’m hoping someone is willing to look through my log and help point me in the correct direction.
The flight controller is a pixhawk 2.4.8 running ArduCopter V4.0.7. I have 4 35A BL_Heli32 ESCs plugged into AUX 1-4 running Dshot150 connected to t-motor air 2216 motors with 1045 propellers.
I followed the tuning process as per the wiki here.
I bring the drone to full throttle and the motors spin, but according to the logs only pull around 7 amps, not nearly enough to get off the ground. I’ve uploaded a log demonstrating this.
You are going to have to reduce take off weight (a lot) or increase thrust.
I’d say your current measurement amps/volt is wrong, maybe double what it should be.
Just plugging a few things into eCalc says you should have about 17A at hover if you can get weight right down. I estimate weight must be up around 2kg. At this stage even going to 4 cell wont help much. I did just make some rough guesses though.
Let us know what battery you’ve got and the total take off weight, even a picture. Any other details too.
Your vibrations are very low (so far) so you should be able to increase INS_GYRO_FILTER to about 40
Actually connect up to MissionPlanner, press Alt A on the keyboard and step through the options, accept all the parameters it offers, if you haven’t already.
Also set BATT_FS_CRT_ACT,1
Thank you both for the reply.
Yes, the props are on correctly and the motors are spinning in their correct directions.
I reduced the weight by 350g by removing the gimbal and camera for test purposes. However, my ultimate goal is to fly the gimbal and camera.
I’m currently running on a 3s battery. I have a 4s battery in the mail on the way.
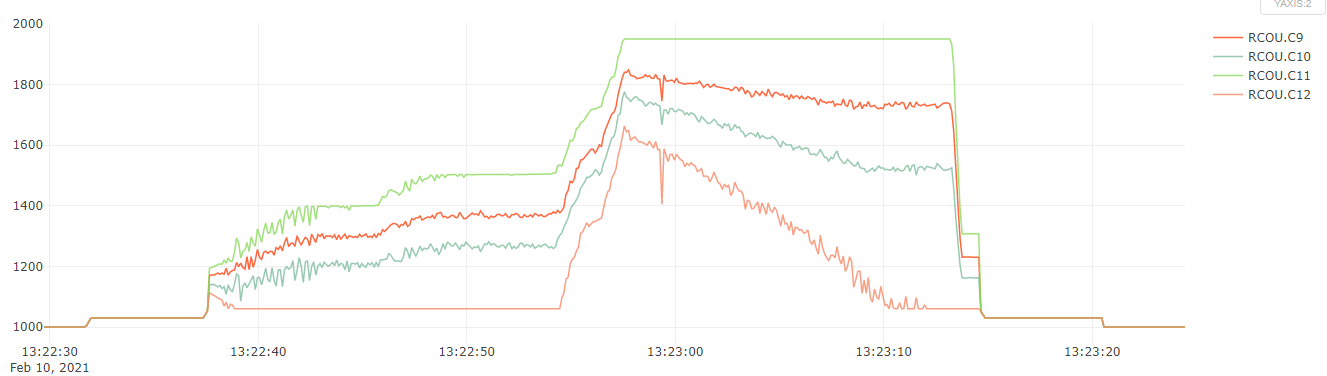
That being said, I believe there is another problem beyond being overweight/underpowered. I did another test flight in my basement and took a video:
As you can see from the video and the log, at max throttle the motors are not running at their maximum, and there is a thrust loss error. After reducing the throttle to around 80%, the thrust error cleared and the drone hopped into the air about a foot and came right back down.
Absolutely. Your symptoms are exactly what happens with Low RPM Power Protect on lower kV motors. Let’s hope it’s the case here because it’s a few mouse clicks to fix
I did as you suggested and disabled low rpm power protect in the ESCs. I believe this fixed some problems, but the drone will still not lift off.
Its weight comes out to just under 1500 grams.
I also recalibrated the power module so it is now reading the correct voltage and current.
Here is an updated log showing the problem. 2021-02-10 15-57-07.bin (584 KB)
The motors are 2216-880kv with 1045 props.
The current battery is a 3s 5200mAh 80C battery and I have a 4s 6000mAh 60C battery on the way.
The entire drone comes in at 1500g.
Do you believe this battery is bad, or am I simply pulling too much energy from it too quickly?
This is my first time hearing about eCalc, I will look into it.
I have been playing around in eCalc and it seems my motor@hover throttle, linear, is between 60-70%.
Switching to a 4s battery brings it down to between 46-52%, which would be, as you say, what I want.
Update.
I obtained a 4s battery and this solved my lift off issue. Although the t-motors claim to run at both 3s and 4s, I have found they do not perform well under lower voltages.
This newer battery weighs more than the 3s battery, however, and even after all this my throttle@hover was still too high.
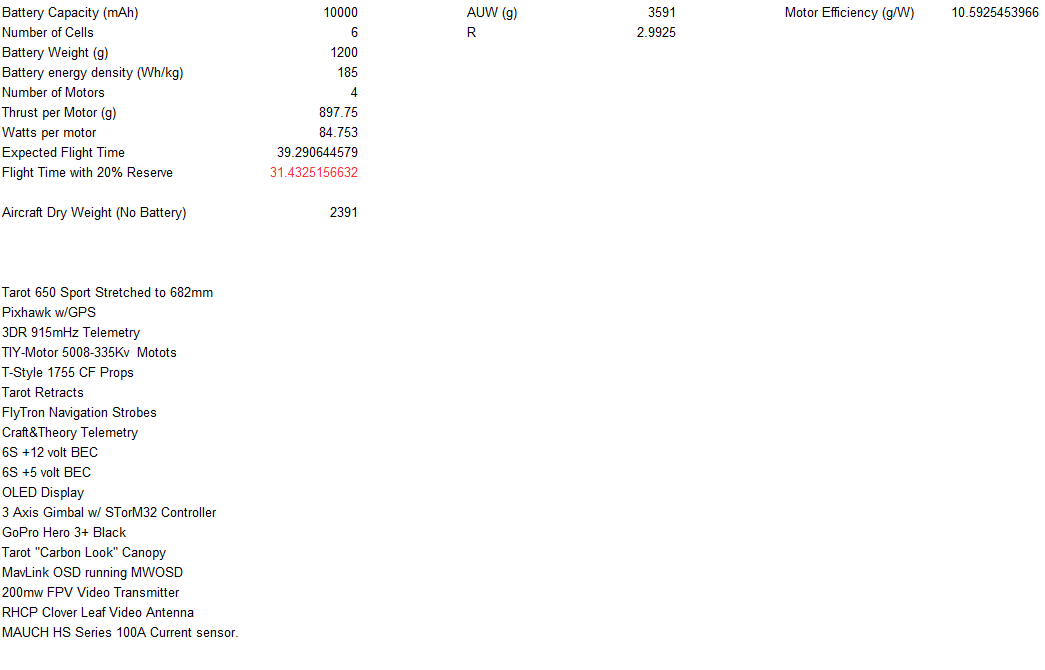
As I mentioned in an earlier post, my goal is to fly a gimbal and camera I own. Because of this, and after playing around on eCalc, I am abandoning this build and have instead put my effort into a hexacopter design with different motors, pictured here:
It’s moot now I suppose but it’s not that they do not perform well on 3S, the craft was just overloaded for the available thrust on 3S. This occurs regularly usually for 2 reasons. It’s not understood that you need a minimum of 2:1 thrust:weight (preferably 2.5:1) or the thrust data published by the manufactures/vendor is BS.
For comparison: My drone uses the same prop size as yours, also a 3S battery (5Ah), but KV930 motors, and it weighs only 1250g complete with everything, including gimbal, camera, and cargo dropper. It has an acceptable but not great thrust margin while the battery voltage is good. When the voltage starts dropping towards the end of charge, my drone quickly gets into the range where thrust reserve is very small, limiting its maneuvering range. So far I haven’t had trouble with that, but it’s at the limit.
Your slower motors and heavier drone, with the same prop size, is a bad combination.If you swap those motors by faster ones, something around KV1000 or slightly above, it should work. Or use a 4S battery. But 1500g with four 1045 size props is too heavy, if you ask me. In fact I plan on making a new structure for my drone, and shed every bit of weight I can, to bring it down to 1000g or perhaps even a tad lower. 1000g total weight with 1045 props, KV930 motors, and 3S battery, would be a good combination.
Propellers get less efficient as they are loaded heavier. So every bit of weight you can shed helps a lot. My impression of the current homebuilt drone scene is that most builds are unreasonably and unnecessarily heavy. We need a good source of lighweight, well-designed monocoque carbon fiber bodies! Not a combination of flat plates, constant diameter tubes, massive junction blocks, and several dozen steel bolts!
Yea, I have a had good success and a lot of fun with small frames and Arducopter. a 3", not flying anymore, a 4" and a 5" and they are all performing well. The sub 250g 5" I just built flies for 30 minutes with a 2S Li-Ion! Pretty cool.