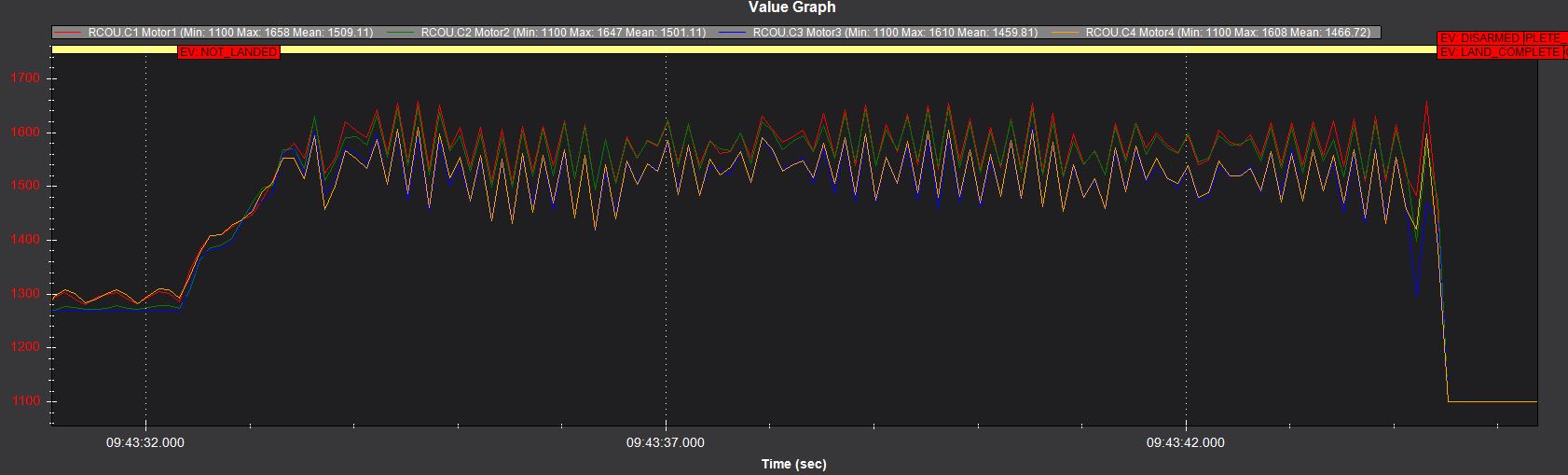
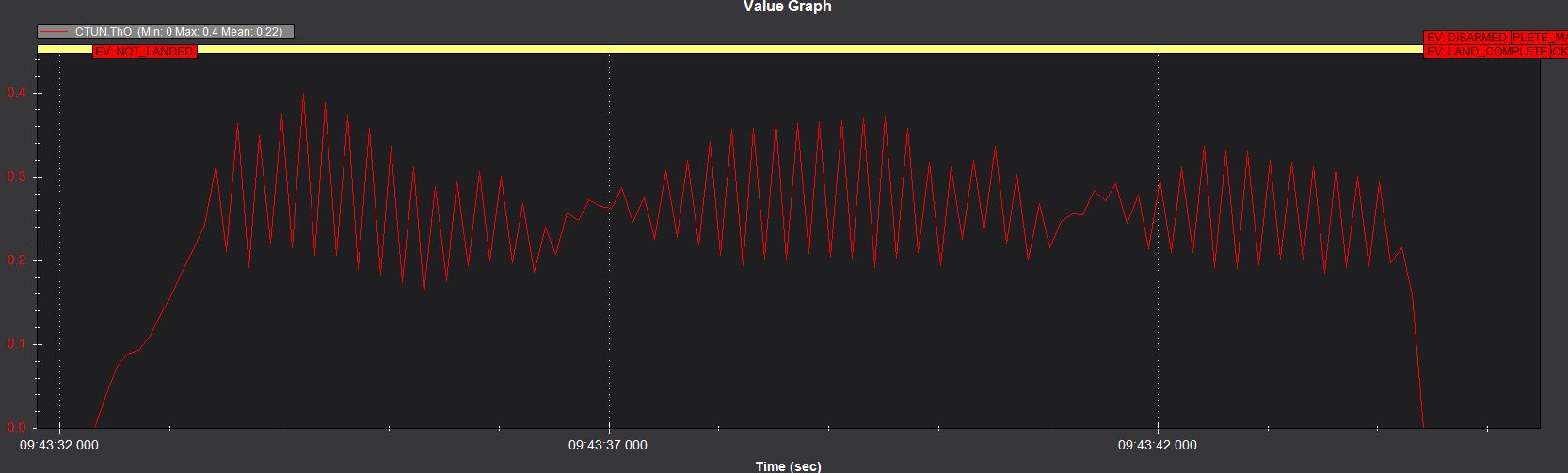
Tuning is the big problem. The attitude control is quite sloppy and with serious oscillations in the motor outputs the flight controller is having trouble getting down on the deck smoothly. And similarly it looks like there is oscillation in attitude control before you even lift off.
How is the stiffness of the frame, and is the landing gear quite rigid and not wobbly?
Start by changing these as a matter of course
ARMING_CHECK,1
ATC_THR_MIX_MAN,0.5
EK3_IMU_MASK,7
EK3_PRIMARY,1
FENCE_ENABLE,1 ← anything bigger than a racing qaud should use this
INS_GYRO_FILTER,20
The EK3 settings suit your flight controller and are the new defaults.
You have nice low vibrations so there should be no need to go as low as 10 on the Gyro filter.
I would “rationalize” the BATT settings, since one sensor is not doing current, and the other is. And they are both giving different voltage readings. Check and calibrate…
Set the same battery voltage levels and failsafe actions for BATT2 as you get for BATT after the Initial Parameters bit below
Next, I would set up the Harmonic Notch Filter as follows
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.222
INS_HNTCH_FREQ,30
INS_HNTCH_BW,15
INS_HNTCH_ATT,40
Now connect to MissionPlanner, Mandatory Hardware, Initial Parameters
Put in your prop size and battery cell count.
Select the Suggested settings too, but no need for you to pick the T-Motor Alpha settings (you already have them)
Accept the FLT and battery voltage related parameter changes, deselect the ACCEL values (you already have them)
I would be tempted to try a test flight in AltHold with these PIDs
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625
If there’s oscillations (worse than usual) land immediately and put those PIDs back to how they were.
If takeoff is OK, just hover for a while and do some gentle pitch and roll.
Then post a link to that log.
If you can get a bit better stability/attitude control you could run Autotune and get this behaving quite well.
FYI:
I understand a lot of larger craft came pre-configured and “tuned” from some suppliers, and I still cant tell how they ever worked properly or flew with any stability - I’ve spent the last couple of years searching for a manufacturers tune that is anything like stable.
I suspect the early T-Motor Flame ESCs have quite poor firmware and maybe new ones (or a firmware update) would do better. If you ever have to pull out the ESCs for any reason, there’s better alternatives.
I’m assuming you have T-Motor Flame ESCs…