Hello,
My drone is china f450 with apm 2.6 and 1000kv motors. I’ve been struggling to tune it last week and today I finnaly got some stable results but close to end of my testing the drone just flipped in Stabilize mode and broke 1 arm and propeller.
Is getting very frustrating after finnaly tuned it to just flip and crash by itself.
Please if anyone can discover some good information in my flight log or tell me how to check what was wrong. I’m new with APM trying to figure it out.
I uploaded .bin log here https://files.fm/u/855833ph
Auto analyze restults :
Log File C:\Users\Underground\Documents\Mission Planner\logs\QUADROTOR\1\2017-11-07 14-57-39.log
Size (kb) 2692.1513671875
No of lines 36721
Duration -1 day, 23:13:19
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = FAIL - Truncated Log? Ends while armed at altitude 8.54m
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
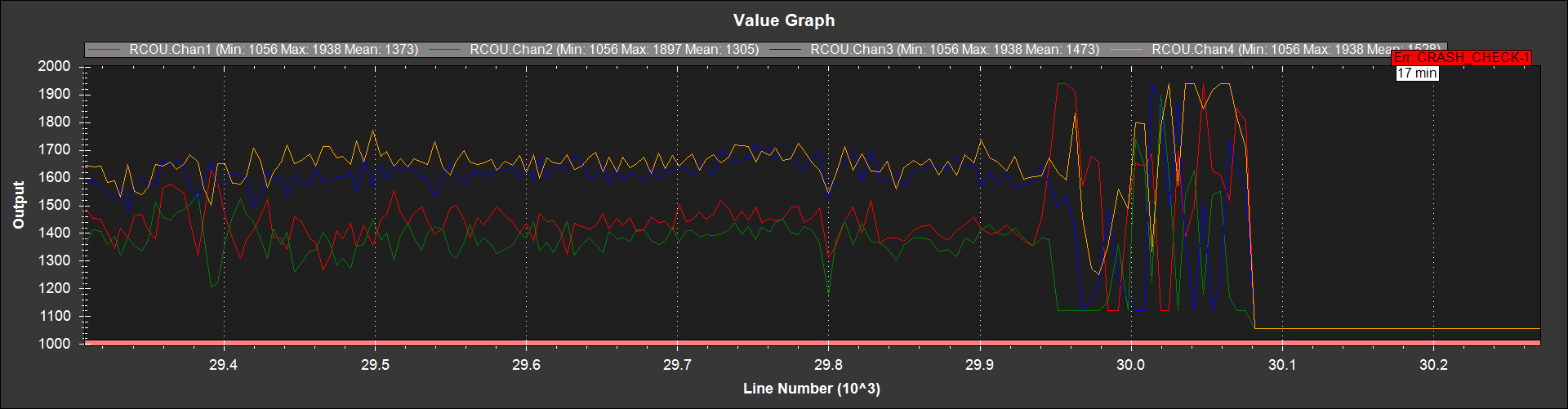
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Motor Balance = FAIL - Motor channel averages = [1380, 1365, 1581, 1586]
Average motor output = 1478
Difference between min and max motor averages = 221
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = GOOD -
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
I calibrated the motors before flying I don’t know why they still unbalanced. Can that be the crash reason ?
Thanks I appreciate your help.