I have a question. (it bothers me for several weeks).
Taking off with Stabilized mode, when I change to Position hold mode, it spins down and shuts down. spinning down, because the position holding speed is lower than taking off speed but I do not know why shut down. Please could you see my log file and let me know what happened in my vehicle!!
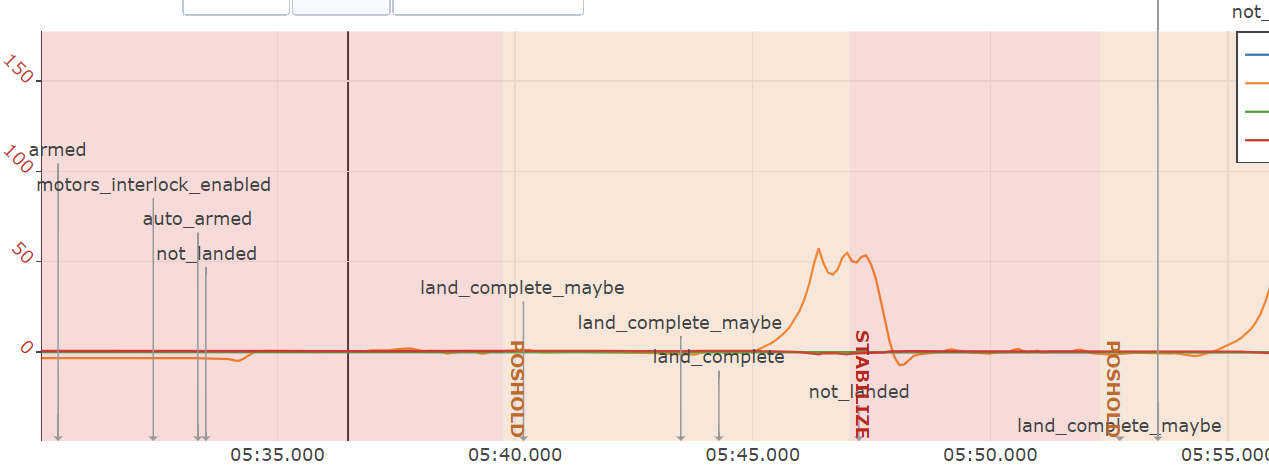
My setup for my test does not change altitude. When I transition to PosHold mode from Stabilized mode, the vehicle keeps asking whether to land or not. As I mentioned, there is no altitude change, so it proceeds to shut down. How can I edit this to prevent a shutdown?
I reviewed the telemetry log. But there is no messages. I uploaded my tlog files and video. here
After shut down my set up going to 60 degree roll. I want to put my vehicle to wind tunnel, so the vehicle does not have an altitude change. My setup like seesaw moving on the trail.
You cant change the behaviour of the modes or the arm/disarm - it’s all gone through years of extensive testing.
I believe your copter is not getting airborne - bench testing does not give realistic results.
You just need to do all the usual pre-flight setup and use MissionPlanner motor test to very motor order and spin direction - then get out and fly.
I post pictures, and videos here.
My goal is when I push my vehicle, it return to origin point. When I change to stabilized mode it turn on again. several video my vehicle turns on again because I rechanged mode to stabilized.