Hi,
I started setting up Matek H743 Slim and I can’t fix a issue: Everything looks fine except drone keeps rotating by itself. I recalibrated the radio in the hope to fix this but didn’t work. I also recalibrated accelerometer but same thing. I have this issue since the first time after swapping the FC. I was using other FC without this issue before the change to Matek (but Ardupilot 4.3.0).
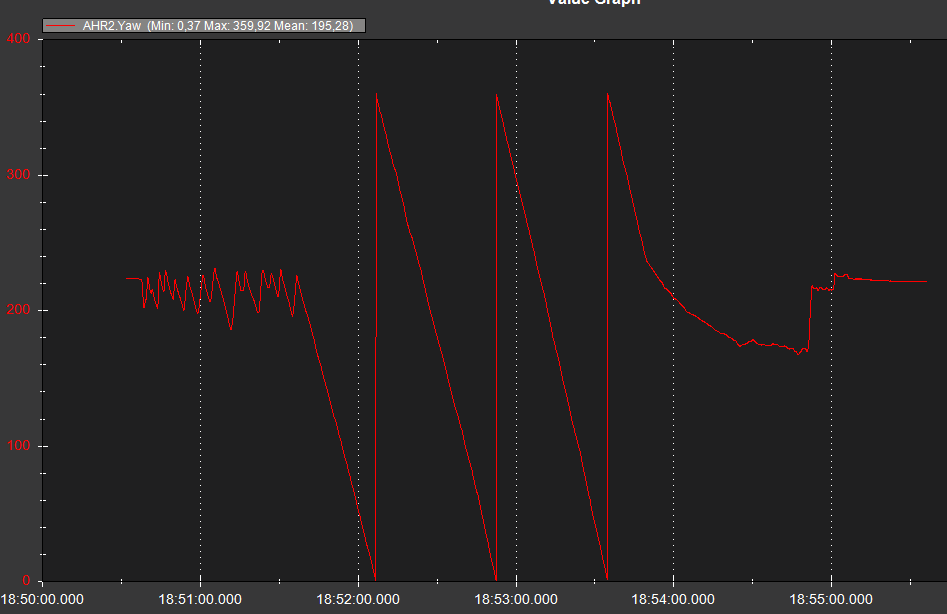
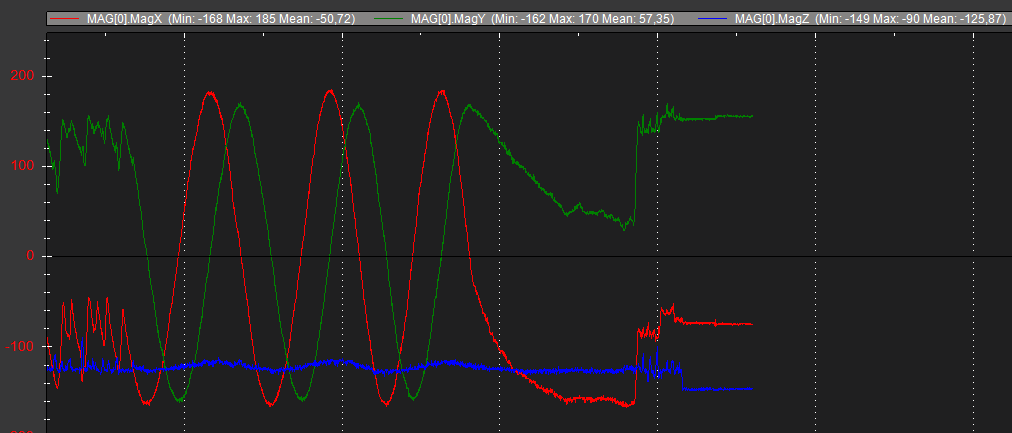
Compass readings makes sense I think accordingly logs. The following screens show this behaviour. In this example I left drone in loiter and didn’t touch the radio, except in the final moments where I moved radio’s trim to compensate this rotation. I can’t see discrepancies among motors in relation to RPM in the logs.
Any suggestions about what to look?
Thanks
The log bin:
settings.param (20.9 KB)