I sent the drone for survey and when it finished the corridors and it was waiting this 5, 10 secs before RTL it completely shut off while on the air. i checked all the cables 2 3 times i didnt see anything touching anywhere or any naked cabled.
I have a log below could someone maybe see what went wrong ?
in which i replaced the “faulty” or “underpowered” gps and powered it externally. Also added a second gps (which from accuracy becomes main) and updated ardupilot.
In previous threat you pointed out the Power.flags which if am not mistaken are the same here 41 == overcurrent. i cannot stress how many times ive checked the cables
funny part is in both occasions that flag went 41 when it was supposed to trigger RTL . In this flight it finished the mapping and it was waiting to RTL. In the post i pasted above i was testing battery fail safe which i have to RTL and when it went to RTL again overcurrent but only gps was lost that time
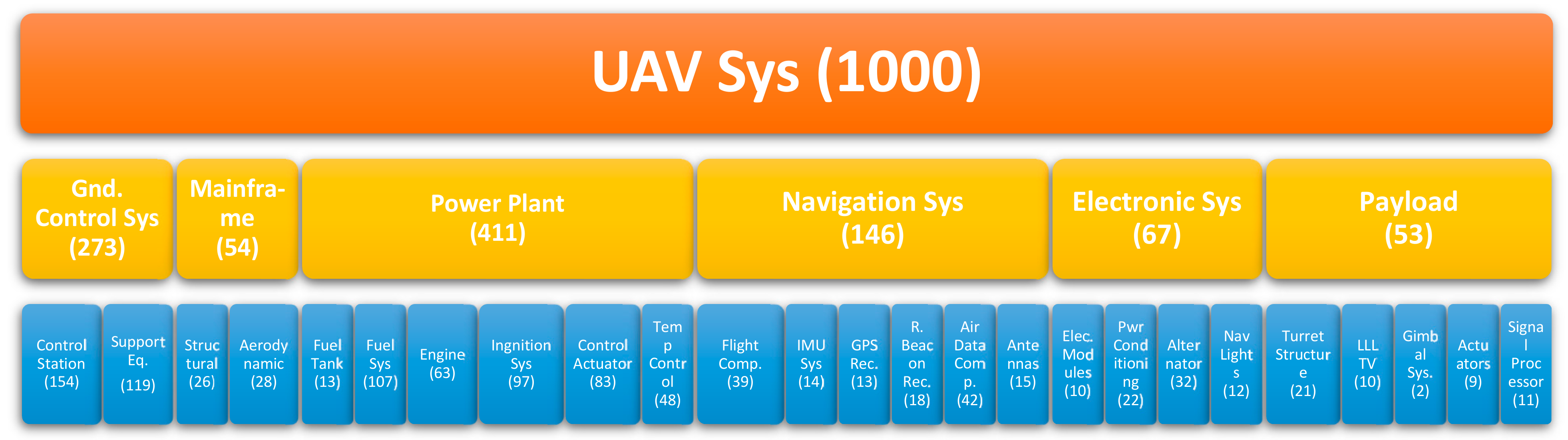
This study is for well designed, well maintained commercial drones.
For most of ArduPilot non commercial users, we need to add the followings:
Bad design
Bad building technique (including solder)
Bad or Cheap components
Bad Configuration & Tuning
Pilot Error
am leaning more in bad component or bad configuration ?
I had around 70 test flights + 15 ,20 ~ survey flights and the two times that drone had “power” issue was when it was about to do the RTL command, which i cant get out of my mind as a coincidence ?
Thank you for having a look on this much appreciated !
I did find the negative cable that goes to the FC from motor 4 a bit smooched , i most likely smooched it under then canopy when i put it on but the metal wire of the cable was not cut or went out of the sleeve (naked) . Would that really trigger a shutdown ?
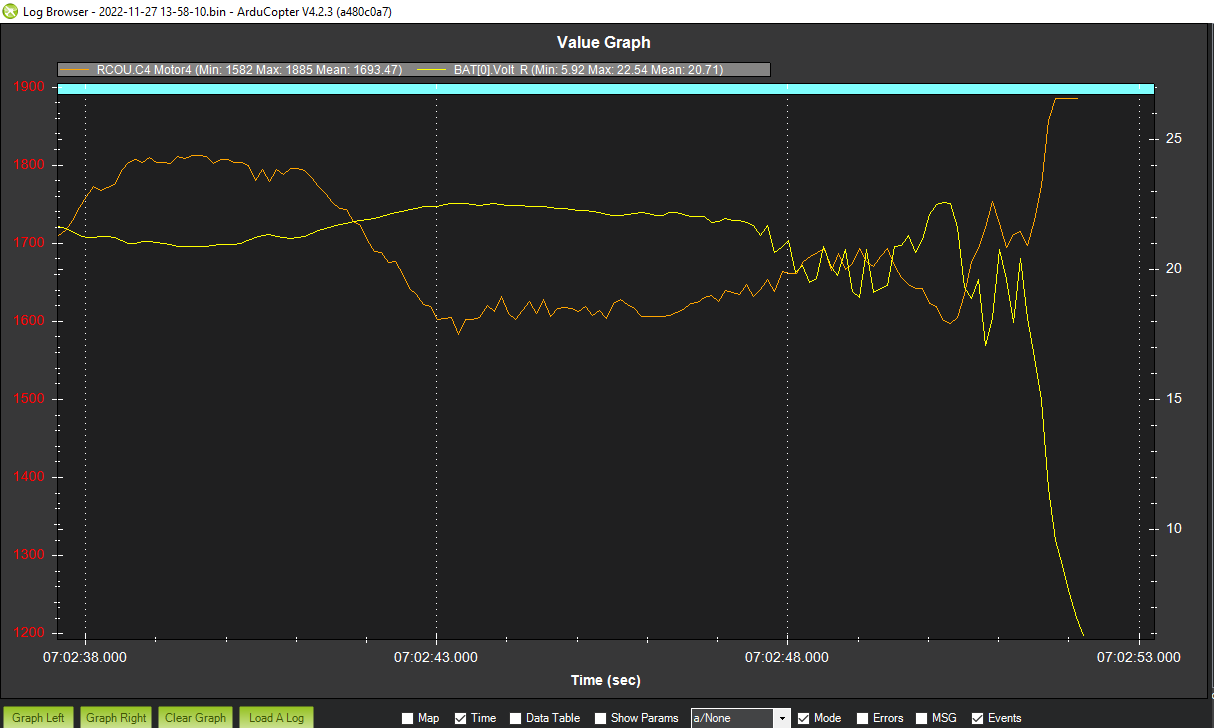
I would replace the ESC first as the correlation with battery level is quite strong and it might get worse at next fly. If you could get the AMPS reading , I guess you could see the current surge at the end of flight , a good sign that the ESC overheating and getting closer to burn.
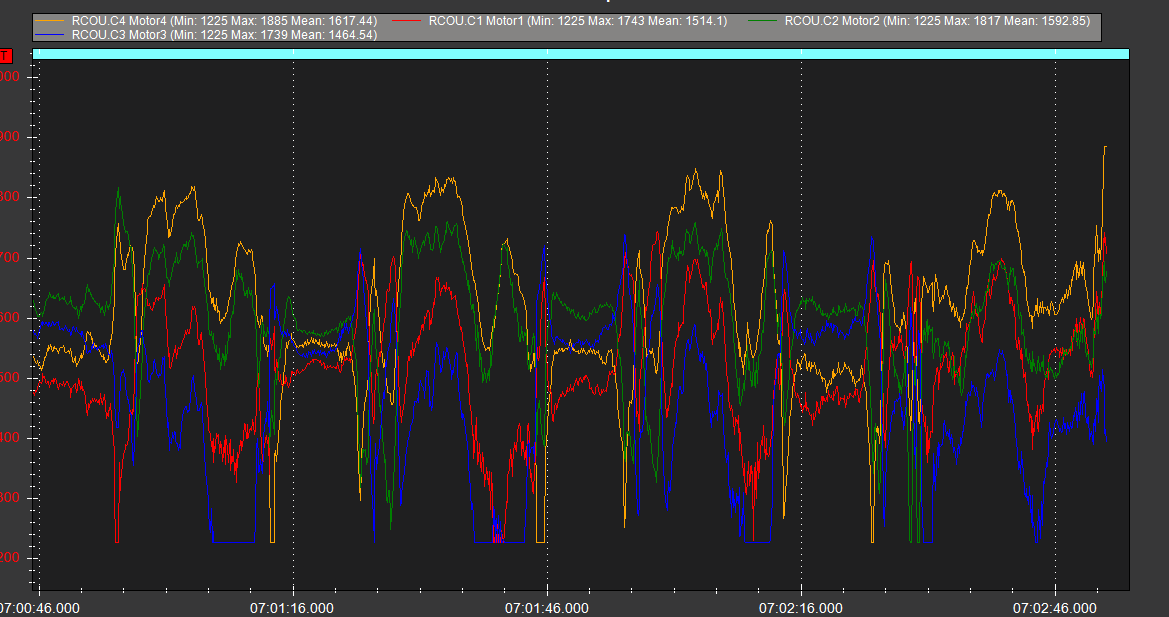
Take a look at your RC1-RC4 curves, it seems there is an asymetric traction on your vehicle, maybe a bad balance , this might be the root cause of your problem as the load on RC4 is much in demand (compared to rc3 that goes minimal many times)
Thank you for the hind i will replace it immediately
The day of the flight was quite windy could it be the asymmetry you are seeing ?
The drone is balanced, on Althold (no wind) its almost still! spend a couple of days 3d printing the battery holder to finalize the balance , maybe the strap went off and it was wobbling ?
ill have a look on previous logs to see if that asymmetry exists there too
Disable voltage cutoff in ESCs or at least set them as low as possible.
Test and accurately set your voltage monitor (BATT_VOLT_MULT) for the lowest expected voltage.
Check and set the BATT Arm, Low and Critical voltage levels via the Initial Parameters calculator.
Always set
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
I find if you ever feel the need to change the battery failsafe levels because you are getting unexpected failsafes then something else is wrong. It is a bad idea to change them (unless going more conservative)
In the situation you have (complete power shut-off) I would get a trusted voltage/current monitor system that will reliably power the flight controller.
There are many cheap ones out there that dont regulate the Vcc 5volts properly and that’s a sure sign they will be unreliable too.
The shut down at the end was practically my mistake for buying a cheap switch (from the battery to PDB) , which got 99% fried on the air , i checked prices on some 100-300A switches so i ended up with out the switch.
Am sorry, i didnt think to check the switch at the first place but am glad that other anomalies could be seen and hopefully get fixed .
Best!
I had calibrated , setup , harmonic, auto before the change of motor 4 & 5 (its actually a combo esc mount motor) do i need to run it again ?
so all 6 graphs should have been in same level , to be correct? (with changes from wind ) .
i have some brand new foldable props 1, 3, 5 and some more wear’d down props 2, 4, 6. those dont match with the graphs , i checked my cabling if i have 5 and 6 in switched places on the FC but are correct
Which switch are you referring to?
I am also facing the same issue. My drone was able to take more than 200 flights and then suddenly if lost power mid air and crashed.
All the wiring seems good. Checked the power as well. Everything seems to be working as intended. Yet to find the cause for the same.