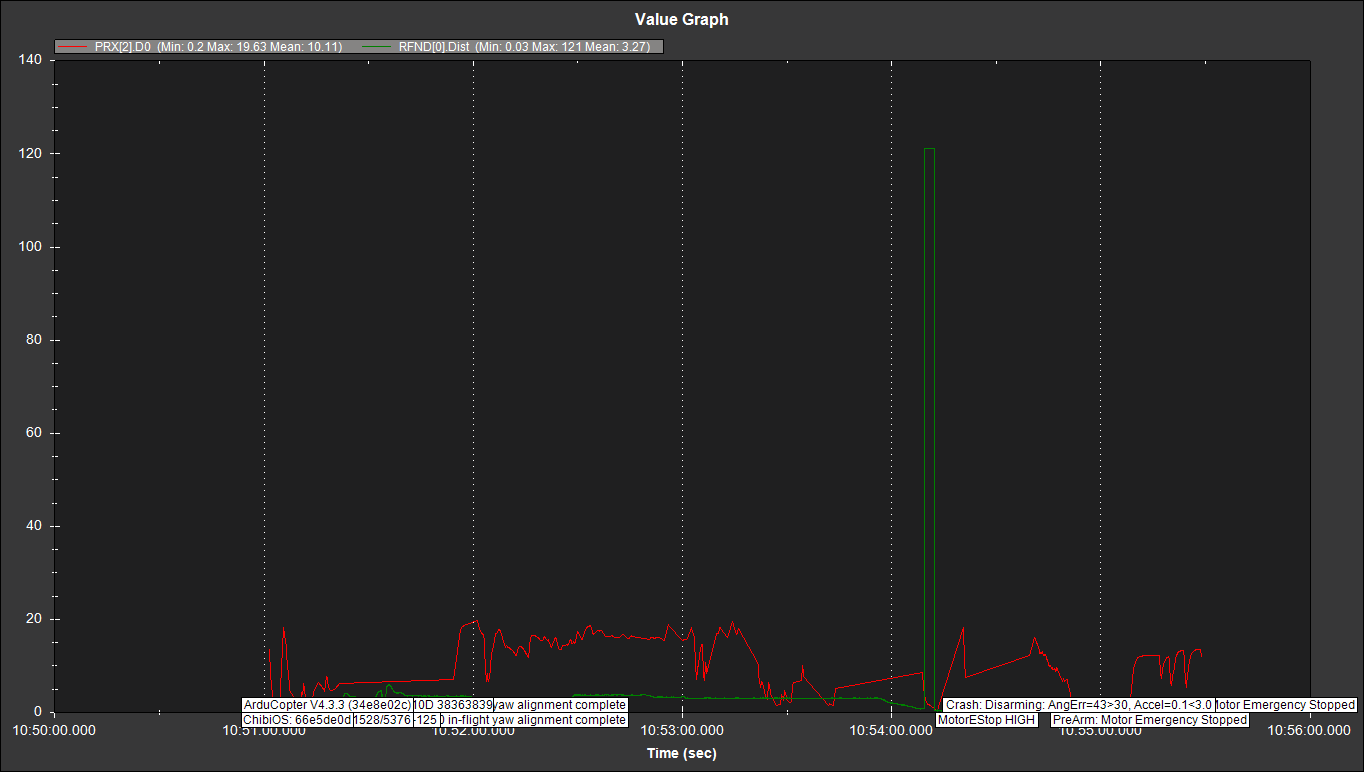
While landing the drone, the crash has occured. It couldn’t follow the desired pitch. Before crash rangefinder (Downward facing) has detected 120m as maximum height, but it is actually at 1m.
Log for the reference
https://drive.google.com/drive/folders/1nQnLnmwLVQt9OnMO5zNKcl-WqjdomnXg?usp=share_link
Thanks in advance